3 modulo8.pdf
TRANSCRIPT
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
1
Señales y Sistemas IIMódulo VIII: Filtros Discretos de
Respuesta Impulsiva Infinita
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
2Contenido de este módulo
1.- Diseño de filtros IIRusando repuesta impulsiva invariante
2.- Diseño de filtros IIRusando la transformación bilineal
3.- Diseño de filtros IIRusando métodos de optimización
4.- Transformaciones de filtros
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
3Observación importante
REPASAR LOS CONCEPTOS Y MÉTODOS
DE DISEÑO DE FILTROS IIR CONTINUOS:
BUTTERWORTH, CHEBYSHEV Y ELÍPTICOS
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
4
1.- Diseño de filtros IIRusando repuesta impulsiva invariante
2.- Diseño de filtros IIRusando la transformación bilineal
3.- Diseño de filtros IIRusando métodos de optimización
4.- Transformaciones de filtros
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
5Respuesta impulsiva invariante
La forma más intuitiva de diseñar un filtro IIR discreto es
mediante el muestreo de la respuesta impulsiva de un filtro
continuo conocido:
h[n] = Ts hc(nTs )
Este procedimiento se conoce con el nombre de “respuesta
impulsiva invariante”
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
6Respuesta en frecuencia y aliasing
La respuesta en frecuencia del filtro discreto obtenido h[n]
estará dada, de acuerdo con el teorema de muestreo, por:
, con ω = ΩTs
donde se hace evidente que para evitar aliasing, la respuesta
en frecuencia del filtro continuo original debe ser de banda
limitada: Hc(Ω ) = 0 para |Ω | ≥ π /Ts , de forma que la respues-
ta del filtro discreto sea: H(e jω) = Hc(jω /Ts ) para |ω | ≤ π
H(e jω) = Hc(jω /Ts+ j2πk/Ts )Σk - ∞=
∞
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
7Construcción del filtro discreto
Supongamos un filtro continuo cuya función de transferencia
Hc(s) y su respuesta impulsiva hc(t) están dadas por:
Aplicando el procedimiento descrito obtenemos h[n]:
h[n] = Ts hc(nTs ) = Ts Ck (esk Ts)n u[n] ΣK
Ck esk t , si t ≥ 0
0, si t < 0
Σk 1=
K
Hc(s) =Σk 1=
KCk
s – skhc(t) =
k 1=
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
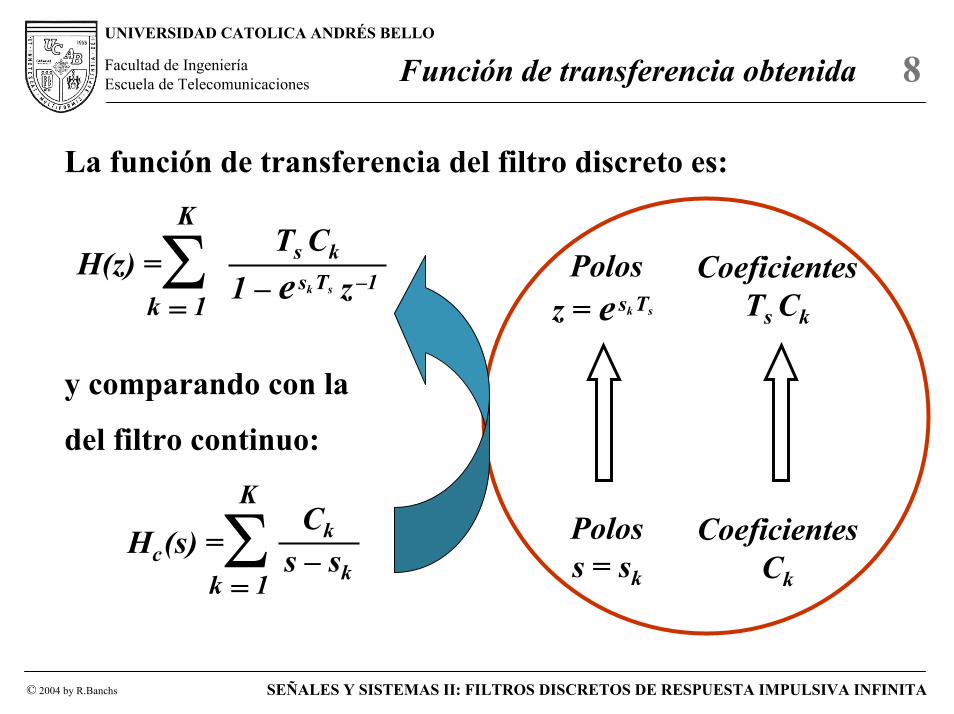
8Función de transferencia obtenida
La función de transferencia del filtro discreto es:
y comparando con la
del filtro continuo:
Ts Ck
1 – esk Ts z –1 H(z) =Σ
k 1=
K
Cks – sk
Hc(s) =Σk 1=
KPoloss = sk
CoeficientesCk
Polosz = esk Ts
CoeficientesTs Ck
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
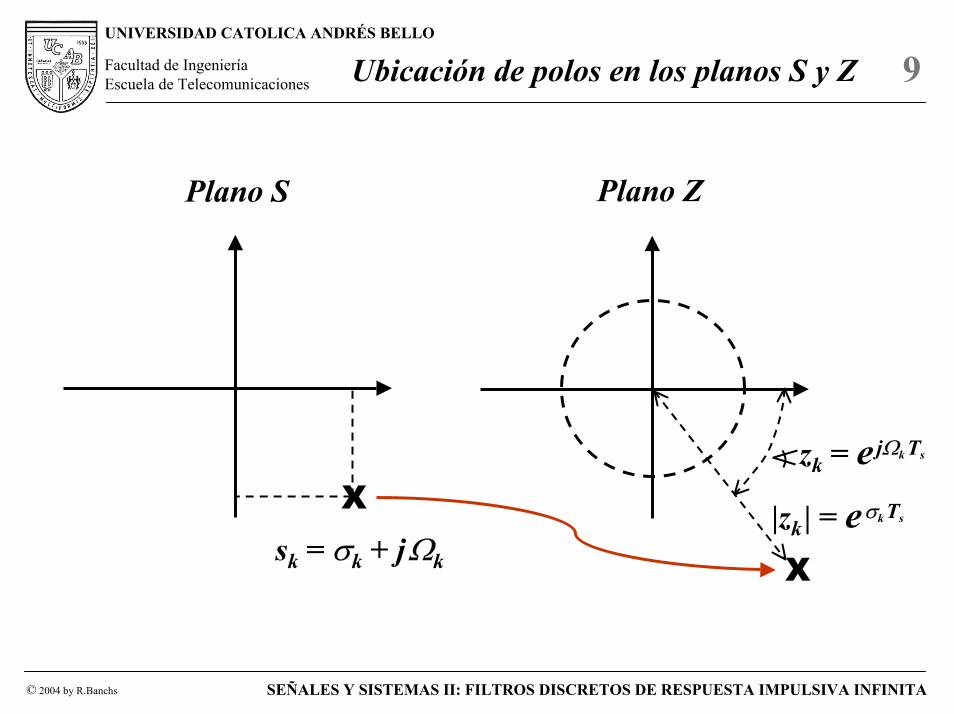
9Ubicación de polos en los planos S y Z
Plano ZPlano S
sk = σk + jΩk
X
X|zk| = eσk Ts
zk = e jΩk Ts
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
10Observaciones importantes
Para la técnica de respuesta impulsiva invariante debe tenerse
en cuenta que:
• Dependiendo del contenido de frecuencia del filtro continuo
original podrá ocurrir solapamiento espectral o aliasing.
• Dado un filtro continuo de partida causal y estable, el filtro
discreto resultante también será causal y estable.
• La ubicación de los polos del filtro discreto resultante zk se
relaciona con la de los del filtro continuo sk mediante la rela-
ción: zk = esk Ts , sin embargo no se puede decir lo mismo delas ubicaciones de los ceros !!!
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
11Ejercicio VIII.1
• DISEÑO DE UN FILTRO IIR
Se desea diseñar un filtro IIR discreto pasabajo con
frecuencia de corte ωc = π /4.
Utiliza el método de respuesta impulsiva invariante
para diseñar el filtro deseado a partir de un filtro
continuo Butterworth de orden 2.
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
12Ejercicio VIII.1
• RESPUESTA
La función de transferencia H(s) de un filtro Butterworth
de orden 2 está dada por:
donde la frecuencia de corte de tiempo continuo Ωc se re-
laciona con la frecuencia de corte de tiempo discreto ωc a
través de la expresión: ωc = ΩcTs
1(s /Ωc)2 + (s /Ωc) +12
H(s) =
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
13Ejercicio VIII.1
• RESPUESTA (continuación)
Reescribiendo H(s) y hallando la ubicación de los polos:
de forma que:
Ωc2
s 2 + Ωc s + Ωc22
H(s) = p1,2 = – Ωc (1+ j) / 2
Ωc2
(s + Ωc (1+ j) / ) (s + Ωc (1 – j) / )2 2H(s) =
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
14Ejercicio VIII.1
• RESPUESTA (continuación)
Descomponiendo H(s) en fracciones simples:
y aplicando la transformación vista en la lámina 8:
(s + Ωc (1+ j) / ) (s + Ωc (1 – j) / )H(s) = +2 2
j Ωc / 2 – j Ωc / 2
1 – e z –1 1 – e z –1H(z) = +
j Ωc Ts / 2 – j ΩcTs / 2– (1+j) Ωc Ts / 2 – (1–j) Ωc Ts / 2
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
15Ejercicio VIII.1
• RESPUESTA (continuación)
Finalmente, manipulando la expresión de H(z) y usando
ωc = Ωc Ts se obtiene:
de donde se extraen fácilmente los coeficientes de la ecua-
ción en diferencias b0, b1, a0, a1 y a2
ωc e sin(ωc / ) z –1
1 – 2 cos(ωc / ) e z –1 + e z –2H(z) =
– ωc / 22 2– ωc / 22 – ωc 2
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
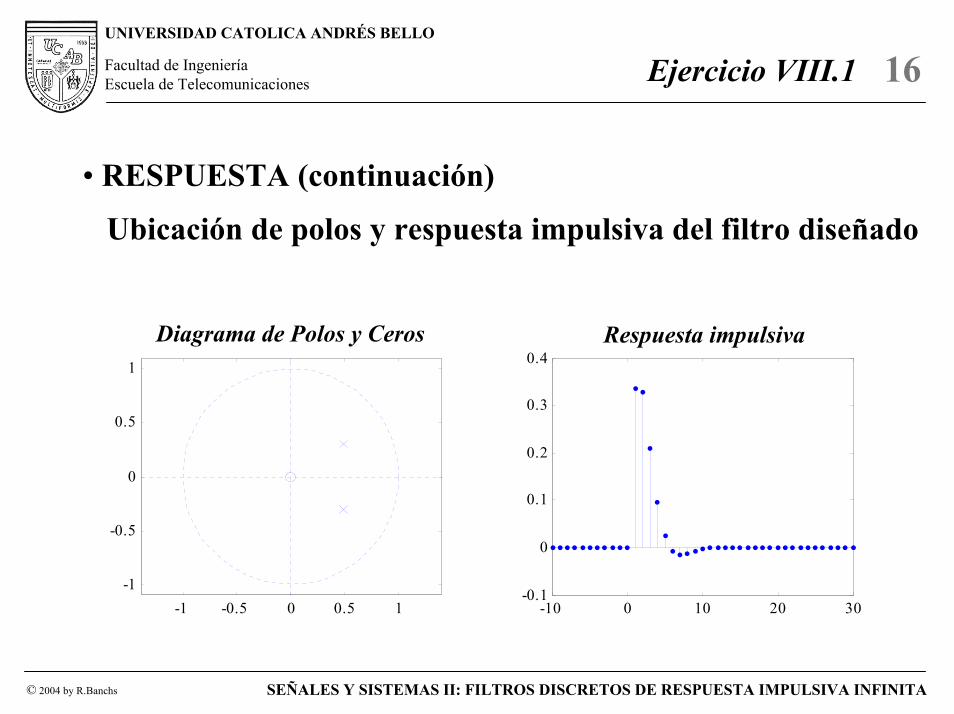
16Ejercicio VIII.1
• RESPUESTA (continuación)
Ubicación de polos y respuesta impulsiva del filtro diseñado
Diagrama de Polos y Ceros Respuesta impulsiva
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
-10 0 10 20 30-0.1
0
0.1
0.2
0.3
0.4
l
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
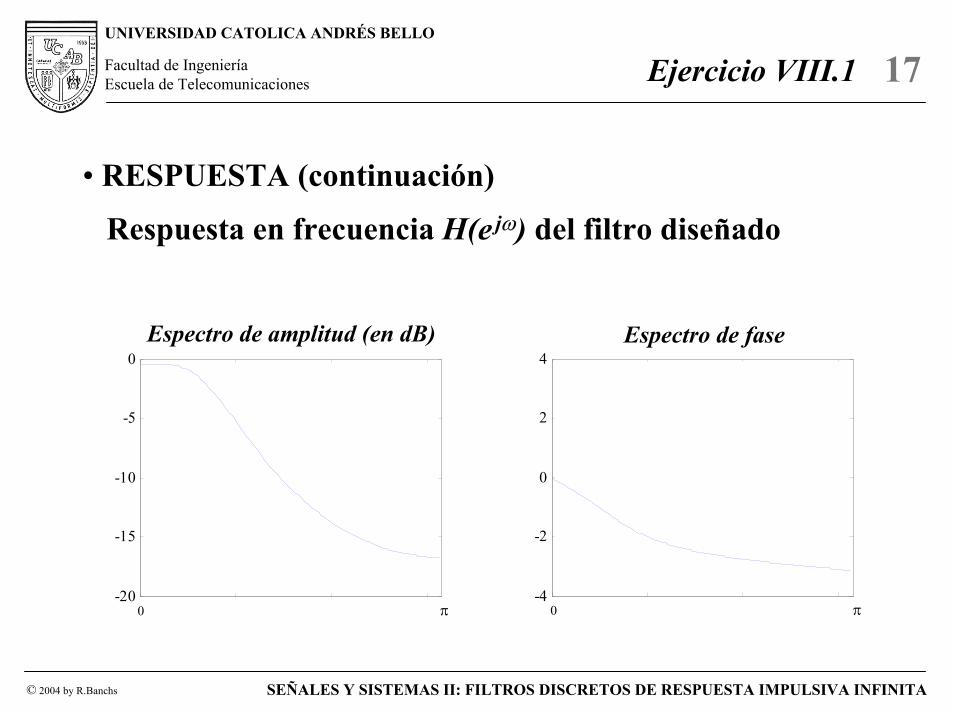
17Ejercicio VIII.1
• RESPUESTA (continuación)
Respuesta en frecuencia H(e jω) del filtro diseñado
Espectro de amplitud (en dB) Espectro de fase
-4
-2
0
2
4
0 π-20
-15
-10
-5
0
0 π
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
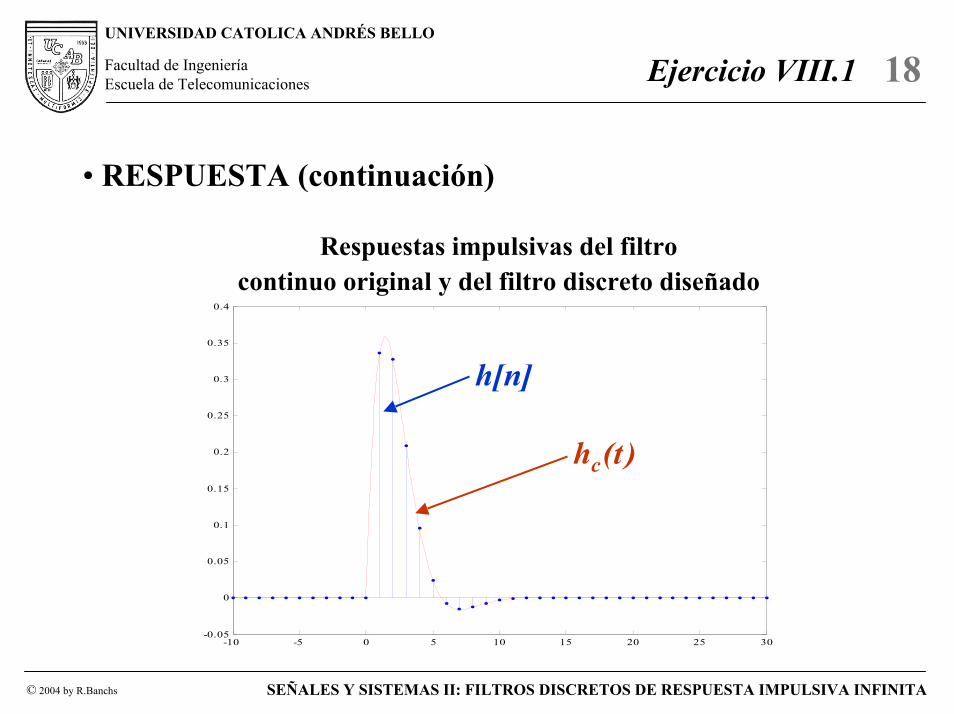
18Ejercicio VIII.1
• RESPUESTA (continuación)
Respuestas impulsivas del filtrocontinuo original y del filtro discreto diseñado
-10 -5 0 5 10 15 20 25 30-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
h[n]
hc(t )
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
19
1.- Diseño de filtros IIRusando repuesta impulsiva invariante
2.- Diseño de filtros IIRusando la transformación bilineal
3.- Diseño de filtros IIRusando métodos de optimización
4.- Transformaciones de filtros
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
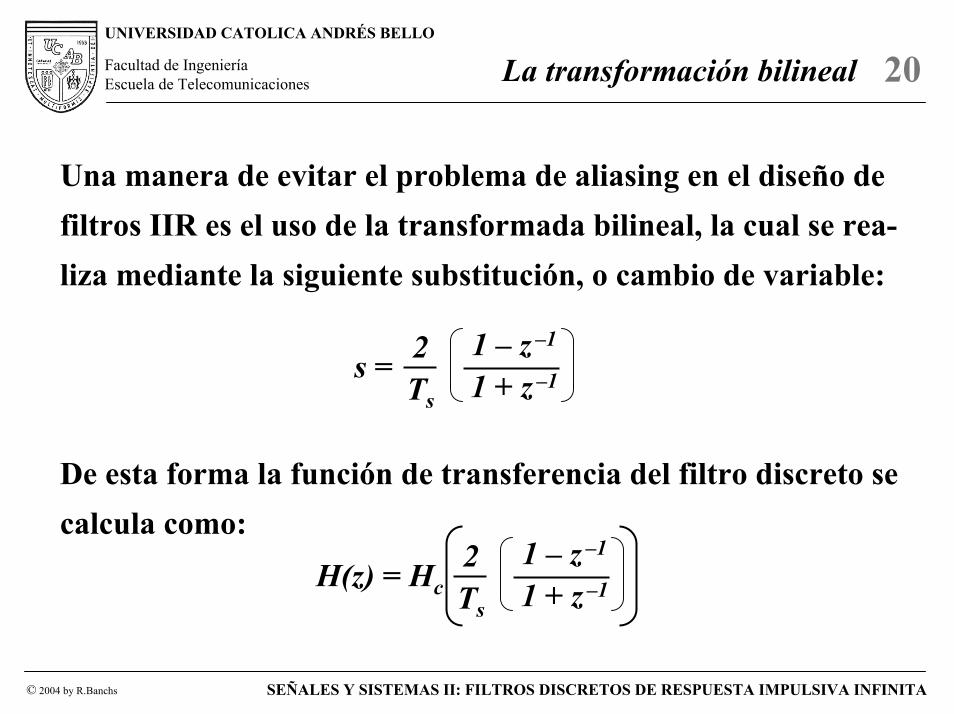
20La transformación bilineal
Una manera de evitar el problema de aliasing en el diseño defiltros IIR es el uso de la transformada bilineal, la cual se rea-liza mediante la siguiente substitución, o cambio de variable:
De esta forma la función de transferencia del filtro discreto secalcula como:
2Ts
1 – z –1
1 + z–1 s =
1 – z –1
1 + z–1 2Ts
H(z) = Hc
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
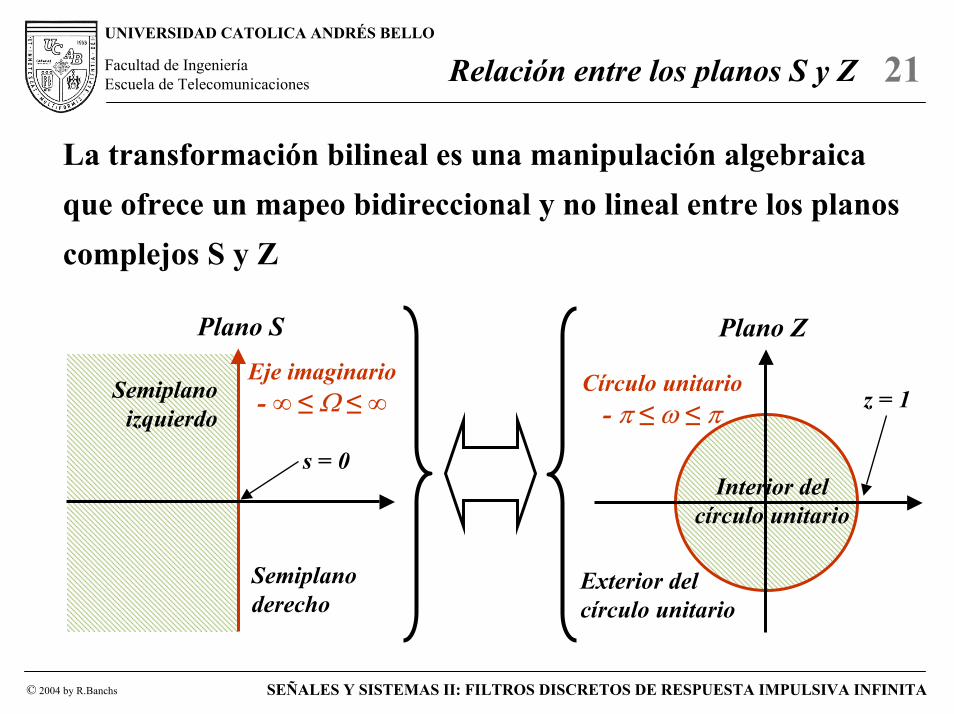
21Relación entre los planos S y Z
La transformación bilineal es una manipulación algebraicaque ofrece un mapeo bidireccional y no lineal entre los planoscomplejos S y Z
Interior delcírculo unitario
Exterior delcírculo unitario
Círculo unitario- π ≤ ω ≤ π
Semiplanoizquierdo
Plano S Plano ZEje imaginario- ∞ ≤ Ω ≤ ∞ z = 1
s = 0
Semiplanoderecho
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
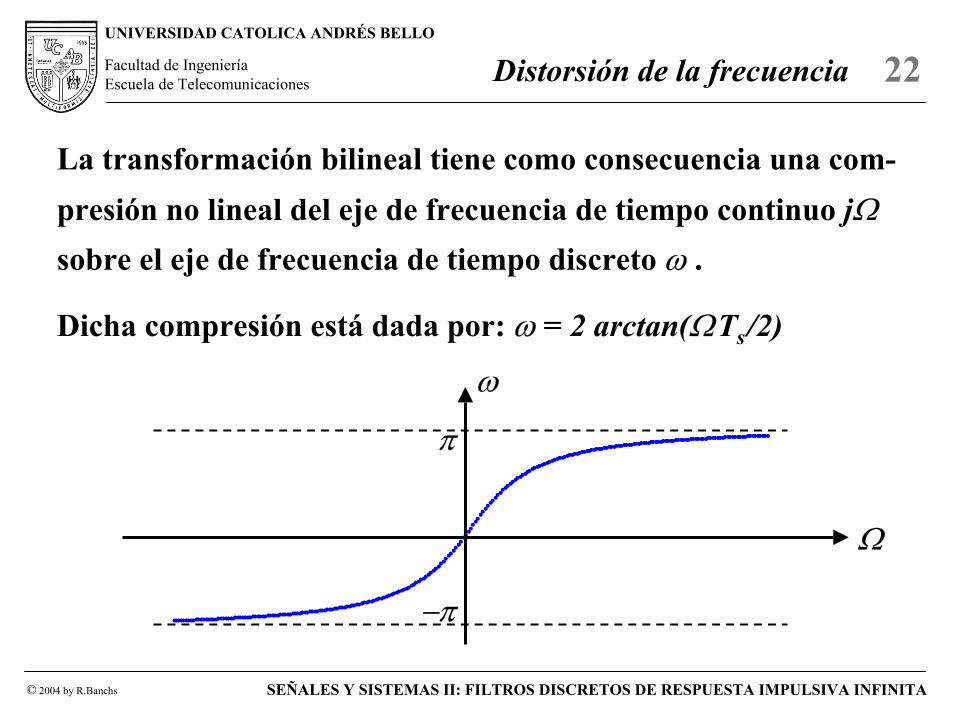
22Distorsión de la frecuencia
La transformación bilineal tiene como consecuencia una com-presión no lineal del eje de frecuencia de tiempo continuo jΩsobre el eje de frecuencia de tiempo discreto ω .
Dicha compresión está dada por: ω = 2 arctan(ΩTs/2)
π
−π
ω
Ω
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
23Observaciones importantes
Para la técnica de transformación bilineal debe tenerse en
cuenta que:
• El eje de frecuencia de tiempo continuo es comprimido en
forma no lineal sobre el eje de frecuencia de tiempo discreto.
• Dado un filtro continuo de partida causal y estable, el filtro
discreto resultante también será causal y estable.
• La ubicación de los polos y ceros del filtro discreto resultante
relaciona con la de los del filtro continuo mediante la relación
establecida por la transformación bilineal.
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
24Ejercicio VIII.2
• DISEÑO DE UN FILTRO IIR
Se desea diseñar un filtro IIR discreto pasabajo con
frecuencia de corte ωc = π /4.
Utiliza el método de la transformación bilineal para
diseñar el filtro deseado a partir de un filtro continuo
Butterworth de orden 2.
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
25Ejercicio VIII.2
• RESPUESTA
Nuevamente la función de transferencia H(s) de un filtro
Butterworth de orden 2 está dada por:
pero ahora, la frecuencia de corte de tiempo continuo Ωc
se relaciona con la frecuencia de corte de tiempo discreto
ωc a través de la expresión: Ωc = 2/Ts tan(ωc/2)
1(s /Ωc)2 + (s /Ωc) +12
H(s) =
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
26Ejercicio VIII.2
• RESPUESTA (continuación)
Aplicando la transformación bilineal:
y la relación entre frecuencias: Ωc = 2/Ts tan(ωc/2)
tenemos que:
2Ts
1 – z –1
1 + z–1 s =
tan2(ωc/2)
2 1 – z –1
1 + z –1+ tan(ωc/2) + tan2(ωc/2)1 – z –1
1 + z –12
H(z) =
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
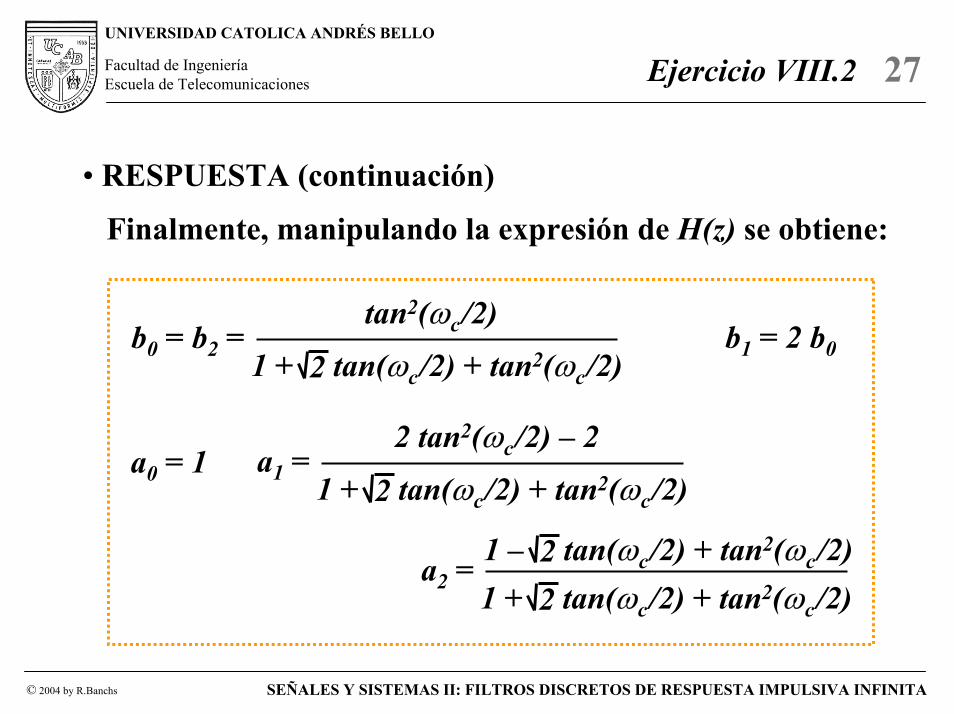
27Ejercicio VIII.2
• RESPUESTA (continuación)
Finalmente, manipulando la expresión de H(z) se obtiene:
tan2(ωc/2)
21 + tan(ωc/2) + tan2(ωc/2)b0 = b2 = b1 = 2 b0
a0 = 12 tan2(ωc/2) – 2
21 + tan(ωc/2) + tan2(ωc/2)a1 =
21 + tan(ωc/2) + tan2(ωc/2)a2 = 21 – tan(ωc/2) + tan2(ωc/2)
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
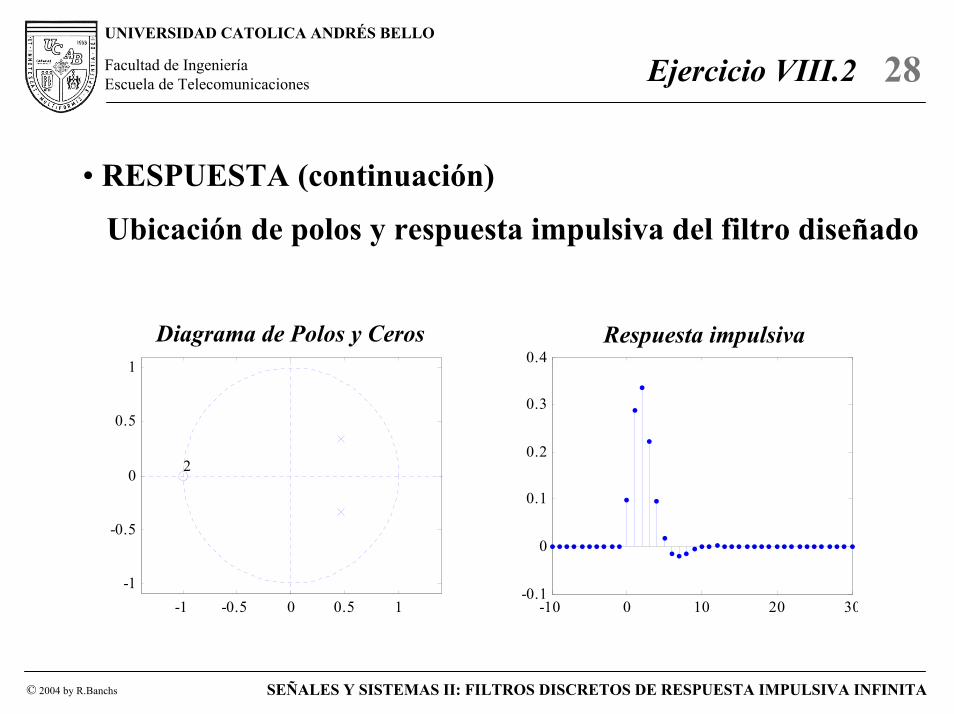
28Ejercicio VIII.2
• RESPUESTA (continuación)
Ubicación de polos y respuesta impulsiva del filtro diseñado
Diagrama de Polos y Ceros
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
2
-10 0 10 20 30-0.1
0
0.1
0.2
0.3
0.4Respuesta impulsiva
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
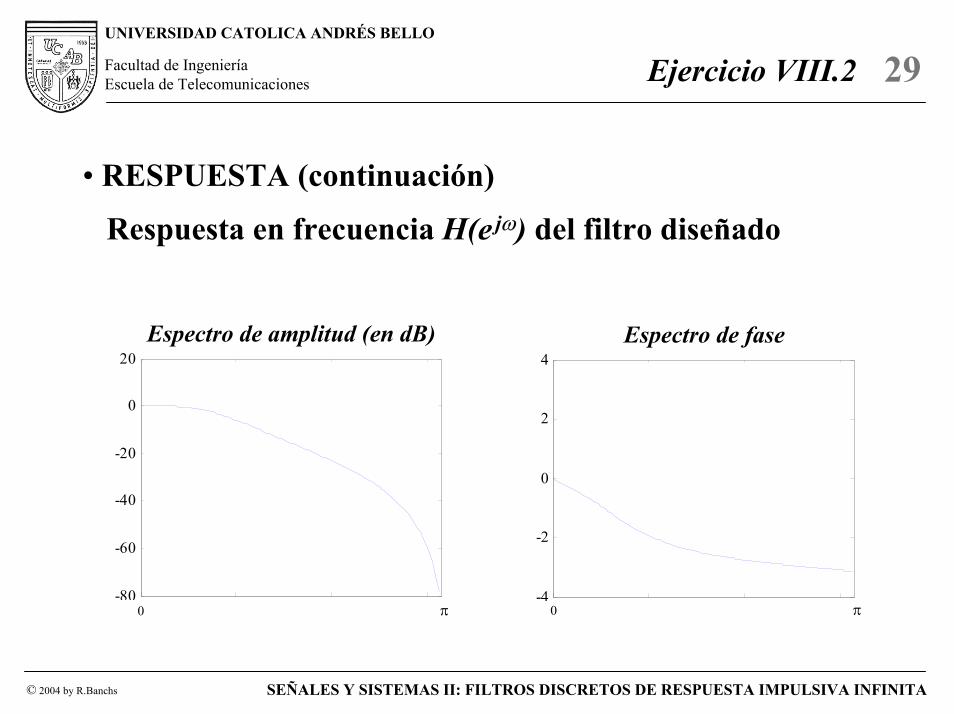
29Ejercicio VIII.2
• RESPUESTA (continuación)
Respuesta en frecuencia H(e jω) del filtro diseñado
Espectro de amplitud (en dB) Espectro de fase
-80
-60
-40
-20
0
20
0 π-4
-2
0
2
4
0 π
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
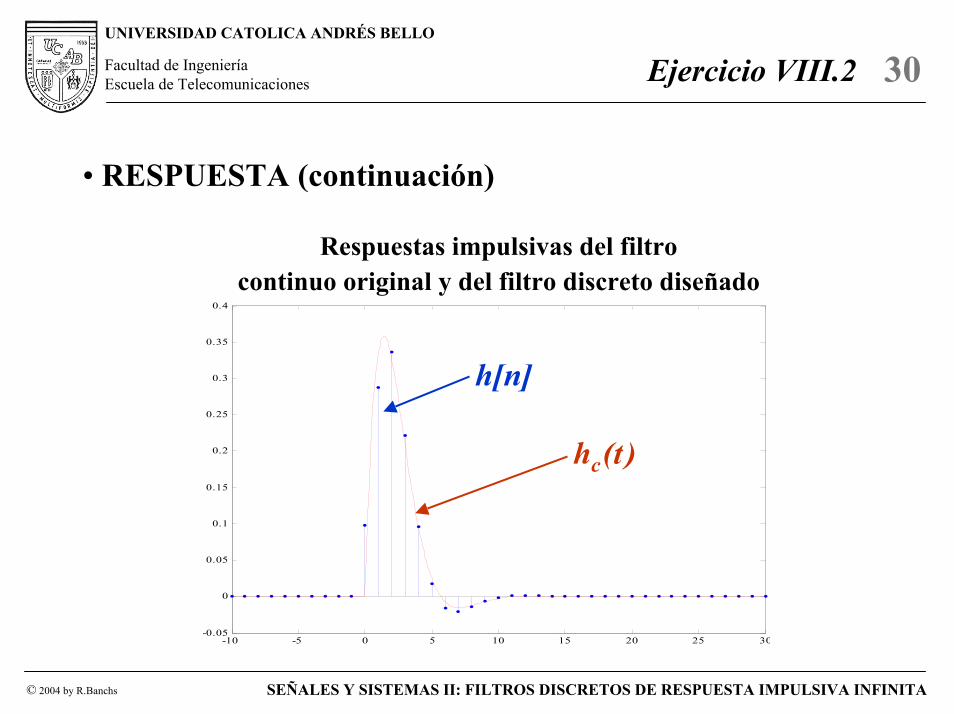
30Ejercicio VIII.2
• RESPUESTA (continuación)
Respuestas impulsivas del filtrocontinuo original y del filtro discreto diseñado
-10 -5 0 5 10 15 20 25 30-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
h[n]
hc(t )
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
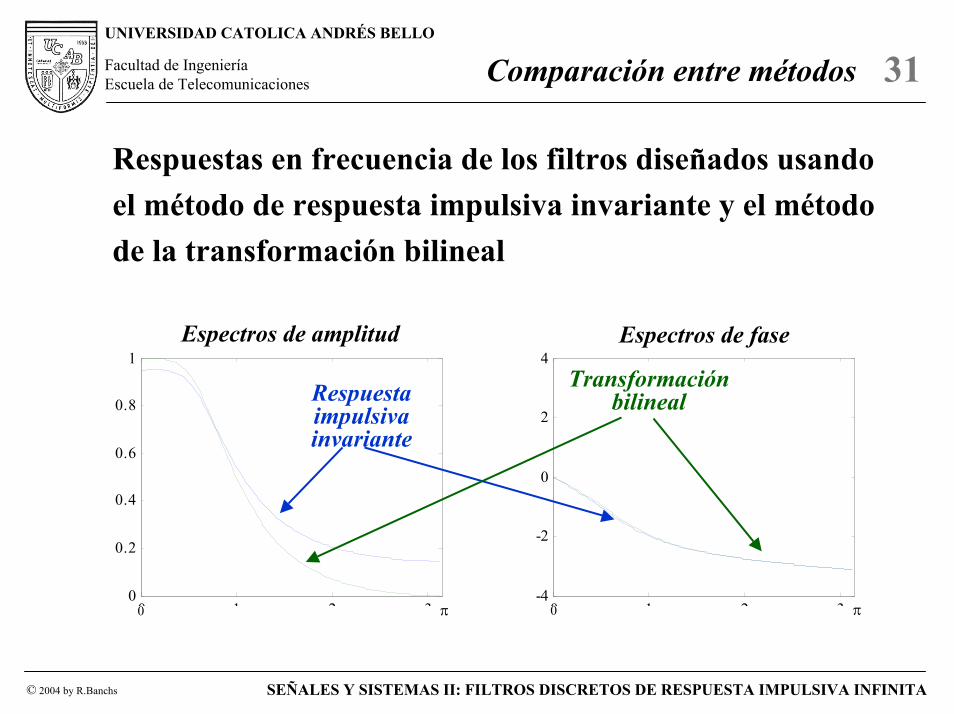
31Comparación entre métodos
Respuestas en frecuencia de los filtros diseñados usandoel método de respuesta impulsiva invariante y el métodode la transformación bilineal
0 1 2 3-4
-2
0
2
4
0 1 2 30
0.2
0.4
0.6
0.8
1Espectros de amplitud Espectros de fase
0 π 0 π
Respuestaimpulsivainvariante
Transformaciónbilineal
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
32
1.- Diseño de filtros IIRusando repuesta impulsiva invariante
2.- Diseño de filtros IIRusando la transformación bilineal
3.- Diseño de filtros IIRusando métodos de optimización
4.- Transformaciones de filtros
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
33Diseño como problema de optimización
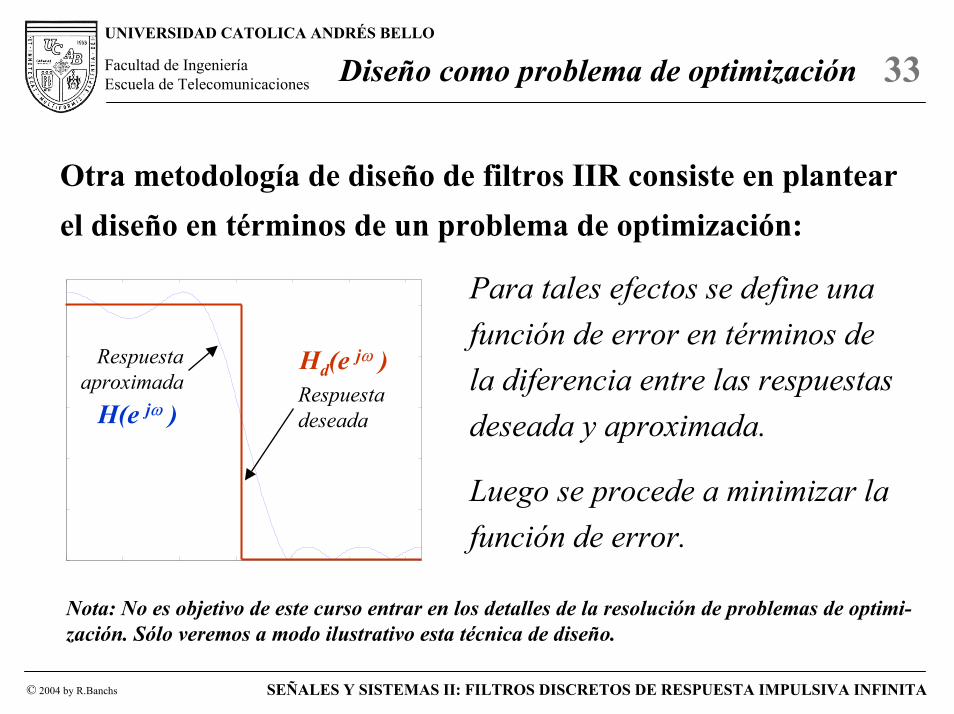
Otra metodología de diseño de filtros IIR consiste en plantearel diseño en términos de un problema de optimización:
Para tales efectos se define unafunción de error en términos de la diferencia entre las respuestasdeseada y aproximada.
Luego se procede a minimizar lafunción de error.
H(e jω )Respuestadeseada
Respuestaaproximada
Hd(e jω )
Nota: No es objetivo de este curso entrar en los detalles de la resolución de problemas de optimi-zación. Sólo veremos a modo ilustrativo esta técnica de diseño.
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
34Método de Deczky
Entre los algoritmos de diseño de filtros IIR que usan métodos de optimización, uno de los más populares es el presentado por Deczky (1972). En este procedimiento, la función de transferencia del filtro di-señado H(z) es representada en forma de productoria:
donde G es la ganancia y * denota conjugación compleja.
(1– zk z –1 ) (1– zk z –1 )(1– pk z –1 ) (1– pk z –1 )H(z) = GΠ
k 1=
K**
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
35Error total y error de magnitud
Y la función de error se construye en términos de una suma pesada del error de magnitud y el error de retardo de grupo entre la respuesta deseada y la diseñada:
donde el error de la magnitud se define como:
Errortotal = α Errormag + (1– α ) Errorrdeg
Errormag = Wmag (ωi) | Hd(e jωi) – H(e jωi) |2mΣi 1=
N
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
36Error de retardo de grupo
y el error del retado de grupo se define como:
NOTA: el retardo de grupo RG(e jω) se define como menosla derivada de la fase de la respuesta en frecuencia.
Errorrdeg = Wrdeg(ωi) |RGd(e jωi) –RG(e jωi) + c |2qΣi 1=
N
ddωRG(e jω) = – H(e jω)
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
37Solución del problema de optimización
De esta forma el error total queda definido como una función
de 4K+2 variables: las magnitudes y fases de los K pares conju-
gados de polos y ceros, la ganancia G y la variable de ajuste c.
El mínimo de la función de error se busca igualando a cero el
gradiente del error, lo cual da origen a un sistema de 4K+2
ecuaciones no lineales que Deczky resuelve utilizando el algorit-
mo iterativo propuesto por Fletcher y Powell (1963).

UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
38Criterio de optimalidad
El método presentado por Deczky tiene la ventaja de ofrecerun criterio de optimalidad variable, el cual es controlado porlos parámetros m y q que aparecen en las expresiones del errorde magnitud y del error de retardo de grupo respectivamente.
De esta forma: • Para m=q=1 se está utilizando el criterio de minimización
del error cuadrático medio.• Para m y q muy grandes (m,q ∞) el criterio de minimiza-
ción aproxima el criterio minimax.
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
39
1.- Diseño de filtros IIRusando repuesta impulsiva invariante
2.- Diseño de filtros IIRusando la transformación bilineal
3.- Diseño de filtros IIRusando métodos de optimización
4.- Transformaciones de filtros
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
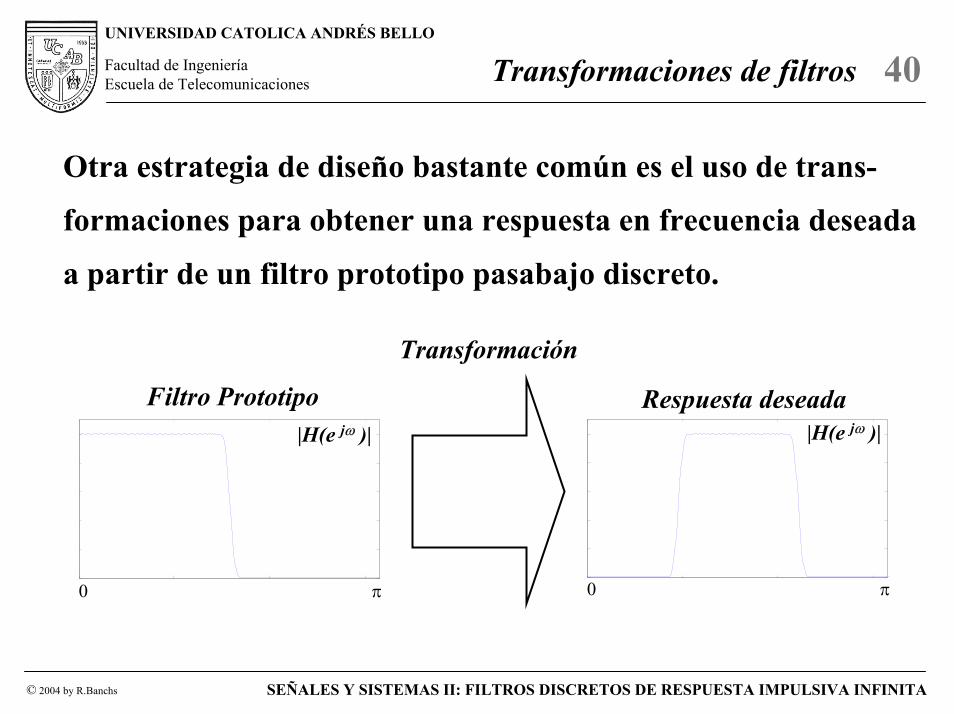
40Transformaciones de filtros
Otra estrategia de diseño bastante común es el uso de trans-
formaciones para obtener una respuesta en frecuencia deseada
a partir de un filtro prototipo pasabajo discreto.
Transformación
Filtro Prototipo
0 π
|H(e jω )|Respuesta deseada
0 π
|H(e jω )|
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
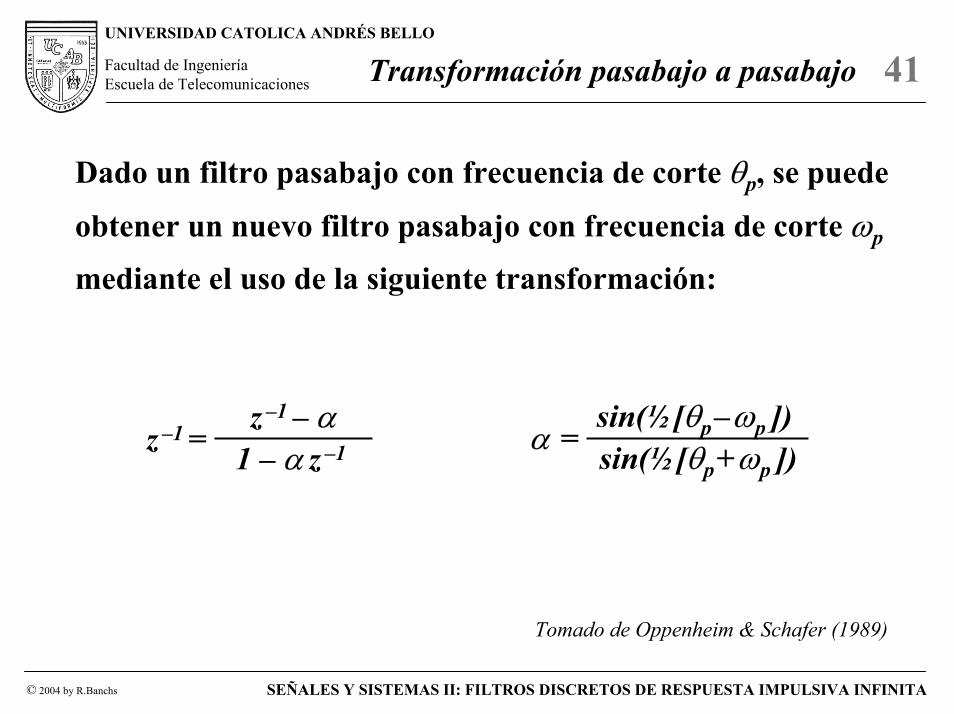
41Transformación pasabajo a pasabajo
Dado un filtro pasabajo con frecuencia de corte θp, se puede
obtener un nuevo filtro pasabajo con frecuencia de corte ωp
mediante el uso de la siguiente transformación:
sin(½[θp–ωp ]) sin(½[θp+ωp ])
z –1 – α1 – α z –1 α =z –1 =
Tomado de Oppenheim & Schafer (1989)
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
42Transformación pasabajo a pasaalto
Dado un filtro pasabajo con frecuencia de corte θp, se puede
obtener un nuevo filtro pasaalto con frecuencia de corte ωp
mediante el uso de la siguiente transformación:
cos(½[θp+ωp ]) cos(½[θp–ωp ])
z –1 + α1 + α z –1 α = –z –1 = –
Tomado de Oppenheim & Schafer (1989)
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
43Transformación pasabajo a pasabanda
Dado un filtro pasabajo con frecuencia de corte θp, se puede
obtener un nuevo filtro pasabanda con frecuencia de corte
inferior ωp1 y frecuencia de corte superior ωp2 mediante el uso
de la siguiente transformación:
z –2 – z–1 +z –1 = –
2α kk + 1
k – 1 k + 1
z –2 – z–1 + 1k – 1 k + 1
2α kk + 1
cos(½[ωp2 +ωp1 ]) cos(½[ωp2 –ωp1 ])
α =
k = cot(½[ωp2 –ωp1 ]) tan(½θp)
Tomado de Oppenheim & Schafer (1989)
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
44Transformación pasabajo a rechazabanda
Dado un filtro pasabajo con frecuencia de corte θp, se puede
obtener un nuevo filtro rechazabanda con frecuencia de corte
inferior ωp1 y frecuencia de corte superior ωp2 mediante el uso
de la siguiente transformación:
z –2 – z–1 +z –1 =
2α1 + k
1 – k 1 + k
z –2 – z–1 + 11 – k 1 + k
2α1 + k
cos(½[ωp2 +ωp1 ]) cos(½[ωp2 –ωp1 ])
α =
k = tan(½[ωp2 –ωp1 ]) tan(½θp)
Tomado de Oppenheim & Schafer (1989)
UNIVERSIDAD CATOLICA ANDRÉS BELLO
Facultad de IngenieríaEscuela de Telecomunicaciones
© 2004 by R.Banchs SEÑALES Y SISTEMAS II: FILTROS DISCRETOS DE RESPUESTA IMPULSIVA INFINITA
45
Fin del Módulo VIIIFiltros Discretos de
Respuesta Impulsiva Infinita