2. modelado software de canales …modelado y control de un canal hidráulico antonio Álvarez...
TRANSCRIPT
Modelado y control de un canal hidráulico Antonio Álvarez Romero
6
2. MODELADO SOFTWARE DE CANALES HIDRÁULICOS
La obtención de un modelo que recoja todas las características geométricas,
hidráulicas y dinámicas de un canal es un requisito imprescindible para que un proyecto como
el que se aborda tenga éxito. No es una materia sencilla de estudiar, ya que es un problema
que involucra diversas cuestiones donde juega un papel predominante la física de fluidos y
donde las condiciones de contorno juegan un papel fundamental. Los diversos paquetes
software especializados en la gestión de canales de riego han sido desarrollados
principalmente en empresas con una clara vocación investigadora, en organismos públicos de
investigación, como pueden ser las universidades o en entornos militares. Las soluciones
ofrecidas son diversas, pero existe un trasfondo común que es el modelado de las ecuaciones
de Saint Venant, de las que se ofrece una reseña en este apartado. También se hará una
reseña de algunos de los paquetes software existentes en el mercado relacionados con el
mundo de los canales hidráulicos y se verá en profundidad el software que se ha empleado en
este proyecto, que es el software SIC (Systeme d´Irrigation de Canaux), desarrollado en Francia
[14][15].
2.1. Las ecuaciones de Saint-Venant
Para el modelado de la dinámica de los canales de irrigación se suelen emplear
sistemas de primer orden con un retraso [8]. Estas dinámicas se obtienen mediante la
aplicación de las ecuaciones de Saint-Venant [8][9][11]. Se pueden ver como simplificaciones
de las ecuaciones de Navier-Stokes [10] para modelos donde el agua es un elemento
fundamental. Estas ecuaciones en la mayor parte de los casos sólo pueden resolverse
mediante métodos numéricos, ofreciendo soluciones analíticas sólo casos muy concretos. Se
trata de ecuaciones no lineales en derivadas parciales que, por facilidad, se linealizan en torno
a un punto de trabajo. Estas linealizaciones son básicas si se quiere llegar a una solución para
el problema del control del canal. Existen dos ecuaciones distintas de Saint-Venant: la ecuación
de continuidad y la ecuación de momento.
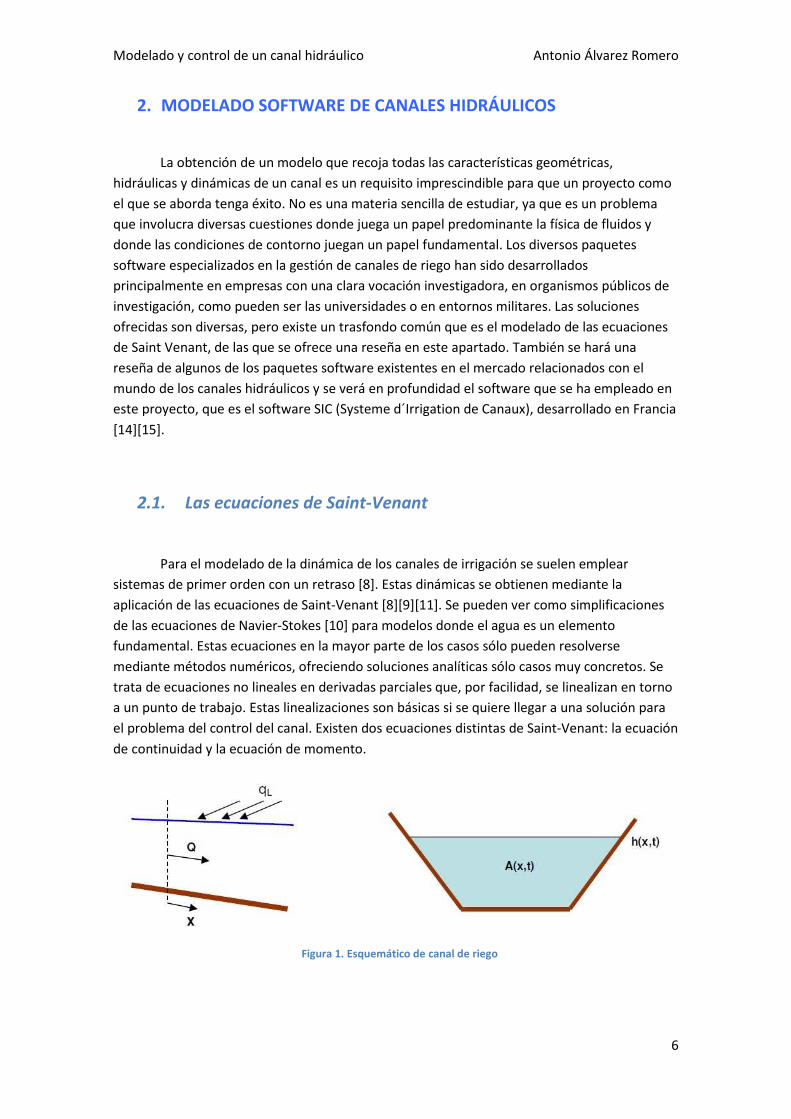
Figura 1. Esquemático de canal de riego

Modelado y control de un canal hidráulico Antonio Álvarez Romero
7
La ecuación de continuidad es una consecuencia del principio de conservación de la
masa: en una determinado volumen infinitesimal de control se cumple que la diferencia entre
la variación del flujo de agua que entra en ese volumen de manera lateral y del flujo de agua
que lo atraviesa en la dirección de la corriente equivale a la variación temporal del área
transversal que queda cubierta por el agua. Puede verse la ecuación en (1).
����
+����
= � (1)
En esta ecuación, el primer término se refiere a la variación longitudinal del flujo de
agua que atraviesa el volumen de control, el segundo se refiere a la variación con el tiempo del
área transversal que cubre el agua. El otro miembro de la ecuación es la variación del flujo de
agua que entra de manera lateral en el volumen de control.
La ecuación del momento, que puede verse en (2) es la representación matemática de
la conservación de la cantidad de movimiento longitudinal:
����+
�(��
�)
��+ �� ��
��+ ���� − ���� = 0(2)
En esta ecuación, Q es el flujo de agua en el volumen de control, A es la superficie
lateral de dicho volumen de control, x es la coordenada longitudinal, g es la fuerza de la
gravedad, Z es la profundidad del agua, mientras Sf y So son las pendientes de fricción y del
fondo del canal respectivamente.
Estas ecuaciones se formulan bajo los siguientes supuestos [10]:
• La distribución de la presión es hidrostática.
• La velocidad se distribuye uniformemente en cualquier sección del canal.
• La pendiente media del fondo del canal es pequeña.
• El flujo de agua es homogéneo.
Por otra parte, la pendiente de fricción del canal debe ser modelada. Existen dos
posibles alternativas para ello: por un lado la ecuación de Manning-Strickler, reflejada en (3) y
por otra parte la ecuación (4).
�� =����
�� /"��
(3)
�� =��|�|%����
(4)
En estas ecuaciones, n es el coeficiente de Manning, medido en '/()/", C es el
coeficiente de fricción de Chézy, medido en ()/�/' , Rf es el radio hidráulico medido en
metros en A sobre el perímetro que queda ocupado por el agua. El coeficiente de Manning se
deduce habitualmente del material del canal.

Modelado y control de un canal hidráulico Antonio Álvarez Romero
8
Para concluir esta pequeña aproximación a las ecuaciones de Saint Venant (que tienen
una ingente cantidad de teoría asociada) es necesario establecer las ecuaciones iniciales y de
contorno bajo las que son aplicadas. Las condiciones iniciales vienen expresadas en la ecuación
(5) y las de contorno se recogen en la (6).
*(�, 0) = *�(�),�(�, 0) = ��(�)(5)
*(0, �) = *-(�),�(0, �) = �-(�),*./� , �0 = *�(�),�./� , �0 = ��(�)(6)
Como se puede ver, las condiciones iniciales están relacionadas con el caudal y la
profundidad del agua a lo largo del canal en el instante cero. Por su parte, las condiciones de
contorno están relacionadas con la evolución temporal del caudal y la profundidad del canal al
principio y al final del mismo, siendo /� la coordenada longitudinal del punto final del canal.
2.2. Paquetes software para el trabajo con canales hidráulicos
En este apartado se relaciona una serie de paquetes software empleados en la gestión
y control de canales hidráulicos. De la mayoría se hará una reseña breve pero en el caso de dos
de ellos se proporcionará mayor información: el software HEC-RAS (Hydrologic Engineering
Centers River Analysis System) [16] y el SIC. En el primer caso, la razón es su gran influencia
mundial y el ser el software elegido en una gran mayoría de casos; en el segundo caso, por ser
el elegido para este proyecto. Se realizará un detallado análisis de cada módulo del programa
SIC y de su importancia en la realización de este proyecto. Existen dos motivos principales para
escoger SIC: uno es que es un software muy específico para lo que se pretende hacer, mientras
HEC-RAS es un software más de propósito general (simula no sólo canales hidráulicos, sino
otras estructuras como ríos o presas), recayendo en el usuario el trabajo de saberlo adaptarlo
a sus necesidades particulares. El otro motivo es que SIC ofrece una pequeña interfaz con
Matlab a la que se le puede sacar mucho partido mientras HEC-RAS es más cerrado en ese
sentido. Además SIC es un software más ligero y que ocupa menos espacio en un ordenador.
Algunos de los paquetes software existente en el mercado son los siguientes:
• MIKE 11: Es un software danés desarrollado en el DHI (Danish Hydraulic Institute) [17].
Proporciona métodos computacionales para el análisis de flujos tanto estacionarios
como transitorios en canales. Es muy útil para el diseño de planes de actuación en
inundaciones. Se puede aplicar en escenarios diversos como canales abruptos o
estuarios estrechos. En este software se recogen estructuras complejas como presas,
que pueden ser simuladas. Ha llegado a ser un estándar en países como Australia,
Nueva Zelanda, Bangladesh y varios países europeos. Tiene la desventaja de no ser un
software libre y de que es necesaria la colaboración del DHI para su configuración.
• SOBEK: Desarrollado en Delft Hydraulic (Holanda) [18]. Abarca aspectos tales como
prevención de inundaciones, sistemas de drenaje, morfología de ríos, control de aguas
subterráneas, inundaciones en alcantarillas, control de calidad del agua o de excesos
de sal en la misma. Puede simular en 1D o 2D.
Modelado y control de un canal hidráulico Antonio Álvarez Romero
9
• DAMBRK (Dam Break Forecasting Model) [19]: Software desarrollado por BOSS
International, es un software pensado para el modelado hidrodinámico de situaciones
de inundación, especialmente pensado para estimar las consecuencias de la rotura de
una presa, y analizar la manera de encaminar el agua hacia aliviaderos que deben
haber sido previamente dimensionados.
• FLDWAV: es una mejora de DAMBRK, anteriormente mencionado, que ofrece nuevas
herramientas para la simulación de estructuras.
HEC-RAS es un software de gestión de sistemas hidráulicos de propósito general,
desarrollado por el ejército de Estados Unidos que puede ser usado de manera interactiva en
entornos multiusuario y multitarea. El software consta de una interfaz gráfica de usuario, de
componentes separados de análisis hidráulico, de capacidad de almacenamiento de datos,
generación de gráficos con los resultados y herramientas de reporting para mostrar dichos
resultados de manera óptima. HEC-RAS realiza análisis de régimen permanente, de régimen
transitorio, de transporte de sedimentos y de calidad del agua. Estos cuatro tipos de análisis,
usan una representación geométrica de los datos común y también es común la rutina de
cálculo geométrico e hidráulico que emplea. HEC-RAS es compatible con los sistemas GIS
(Geographical Information System).
Además, se ha desarrollado una potente base de datos llamada HEC-DSS (HEC Data
Storage System) para el almacenamiento y recuperación de manera eficiente de datos
científicos estructurados de manera secuencial como, por ejemplo, series de datos temporales,
curvas o datos en forma de texto. Se pueden programar interfaces con HEC-DSS en lenguajes
de programación como C++, Visual Basic y Java. De esta manera, gracias a HEC-DSS se puede
cargar e importar datos con diferentes formatos, exportarlos, crear gráficas a partir de ellos y
manipularlos matemáticamente. HEC-DSS es compatible con Windows, Apple y con varias
versiones de Linux y no es necesario pagar licencia para su uso.
Al software empleado en este proyecto, el software francés SIC, se le dedica el
siguiente apartado.
2.3. El software SIC
El software SIC es un software desarrollado en Francia pensado para ser usado tanto
por ingenieros como por operadores dedicados a la gestión de canales.
La primera versión de este software fue desarrollada en el seno del IIMI (International
Irrigation Management Institute) [20] en un canal real situado en la costa sur de Sri Lanka. Se
pretendía que fuese fácil de usar por los operadores y que tuviese la función de herramienta
de soporte a la hora de tomar decisiones sobre la operación del canal. Como los resultados
obtenidos fueron prometedores, el CEMAGREF [15] junto a otros socios tomaron la decisión de
desarrollar una nueva versión más ambiciosa del programa, con el objetivo de que se
convirtiese en un estándar aceptado a nivel mundial.
Modelado y control de un canal hidráulico Antonio Álvarez Romero
10
El modelo SIC fue concebido para simular el comportamiento hidráulico de canales de
riego en flujo subcrítico. Para ello se emplean las ecuaciones completas de Saint Venant y es
necesaria una descripción completa del canal para que el modelo tenga suficiente precisión.
Este programa procesa los datos del canal con un paso configurable que por defecto es de 200
m. También se puede configurar el tiempo de muestreo, que puede escogerse entre 0.6 y
60000 segundos. Con la evolución de las versiones se ha ido logrando una interfaz cada vez
más amigable con el usuario.
SIC está dividido en tres módulos o unidades:
• Unidad topográfica dedicada a la descripción del canal. Se emplea para introducir los
datos geométricos y topológicos del mismo.
• Unidad dedicada a la realización de cálculos en régimen permanente, dadas las
condiciones de contorno (descargas, aperturas de compuertas, etc).
• Unidad dedicada a los cálculos en régimen transitorio, en la que se tiene en cuenta la
evolución temporal de las condiciones de contorno.
A continuación se estudiarán con detalle cada uno de estos módulos.
2.3.1. Módulo de topología y geometría del canal
Este primer módulo ofrece un editor gráfico donde se introducen todos los datos
necesarios relativos al canal que se pretende simular. Estos datos pueden ser obtenidos de una
fuente topográfica del canal o desde planos. Cuando se describe la topología de un canal es
necesario indicar los puntos (nodos) donde existe inyección o salida de caudal de agua. Estos
puntos reciben el nombre de offtakes. La porción de canal entre dos nodos es llamada tramo.
Los canales se describen en base a secciones cruzadas, donde se indican datos
relevantes como la forma de la sección (circular, cuadrada, trapezoidal), las coordenadas
(tomando como referencia el comienzo del canal para la coordenada longitudinal y el nivel del
mar para la altura) de los puntos significativos de la misma, el coeficiente de Manning o las
pérdidas por filtración. A continuación se explica lo que significa cada parámetro que define
una sección cruzada:
• RS: es el nombre de la sección, que es un número que expresa una referencia
kilométrica.
• Cuatro puntos expresados en sus coordenadas (X,Y): son puntos que describen la
geometría de la sección. La forma normal de la geometría es rectangular o trapecial.
X1 vale siempre 0 metros y el resto de valores X están expresados respecto a ese
punto. Los valores de la coordenada Y se expresan en valores absolutos (respecto al
nivel del mar). Los datos están en metros.
• Longitud hasta la siguiente sección, expresada en el extremo derecho de la misma, en
el centro y en el extremo izquierdo.

Modelado y control de un canal hidráulico Antonio Álvarez Romero
11
• Coeficiente de Manning: es un coeficiente de rugosidad del canal y se indica en el
extremo derecho, en el centro y en el izquierdo de la sección. Modela la fricción del
canal
• Coeficientes de contracción y expansión
• Ancho de fondo
• Pendiente de bordo: es el inverso de la pendiente de los lados de la sección que no son
paralelos al suelo. Un caso particular es el de las secciones cuadradas, cuya pendiente
es 0.
• Cota de bordo: cota de la parte superior de la sección.
• Cota de fondo: cota de la parte inferior de la sección.
En las tablas 2, 3 y 4 pueden consultarse los valores de todos estos parámetros en cada
sección cruzada que define el canal.
Existen secciones especiales llamadas singulares que sirven para especificar
estructuras que pueden contener compuertas y presas. En el caso de este proyecto se emplea
una sóla compuerta por sección singular. Una compuerta se caracteriza por parámetros como
la anchura, la altura o el coeficiente de descarga.
Figura 2. Canal editado con EDITAL

Modelado y control de un canal hidráulico Antonio Álvarez Romero
12
La introducción de los datos del canal se realiza mediante el editor gráfico EDITAL
(Figura 2). El resultado de emplear este editor es un archivo de extensión .TAL que guarda
todos los datos topográficos, geométricos y gráficos del sistema. Este fichero es chequeado
mediante el programa TALWEG que además crea otros archivos necesarios para el resto del
proceso, con extensiones .MIN, .GEO, .TIT, .DIS y .LST. Los resultados de este chequeo pueden
ser consultados mediante RESTAL, que es el visor que completa este módulo.
2.3.2. Módulo de régimen permanente o de flujo estable
El segundo módulo sirve para trabajar con el canal en régimen permanente. Tiene un
editor, llamado EDIFLU, que se emplea para crear el fichero con todos los datos hidráulicos que
hacen falta para los cálculos en flujo estable. En este proyecto se emplea básicamente para
detallar los offtakes (Figura 4) y definir las compuertas (Figura 3), una vez se estableció en el
primer módulo su ubicación en el canal.
Figura 3. Definición de una compuerta con EDIFLU
Cuando se describe una sección cruzada singular que va a contener una estructura
(cross device), se pueden incluir en ella compuertas rectangulares, compuertas de tipo Gec-
Alsthom o presas (weirs). Los parámetros se especifican en el cuadro de diálogo (Figura 3) y
son los siguientes:
Modelado y control de un canal hidráulico Antonio Álvarez Romero
13
• Anchura de la compuerta
• Altura de la compuerta
• Elevación de la misma respecto al nivel del mar
• Coeficiente de descarga
• Apertura de la compuerta en el punto de equilibrio.
• Ecuación que gobierna el funcionamiento de la compuerta. Existen varias opciones que
son detalladas en la documentación teórica proporcionada por el software SIC [21]. La
que se utiliza en este proyecto es la opción CEM88, que se corresponde con la Weir-
undershot gate equation en el caso de una compuerta rectangular, que son las que se
emplean en este proyecto.
Existe además la opción de especificar una compuerta ajustable, indicándole la
apertura máxima y el valor objetivo del nivel aguas arriba. Sin embargo, eso se dejará para la
parte de control de este proyecto.
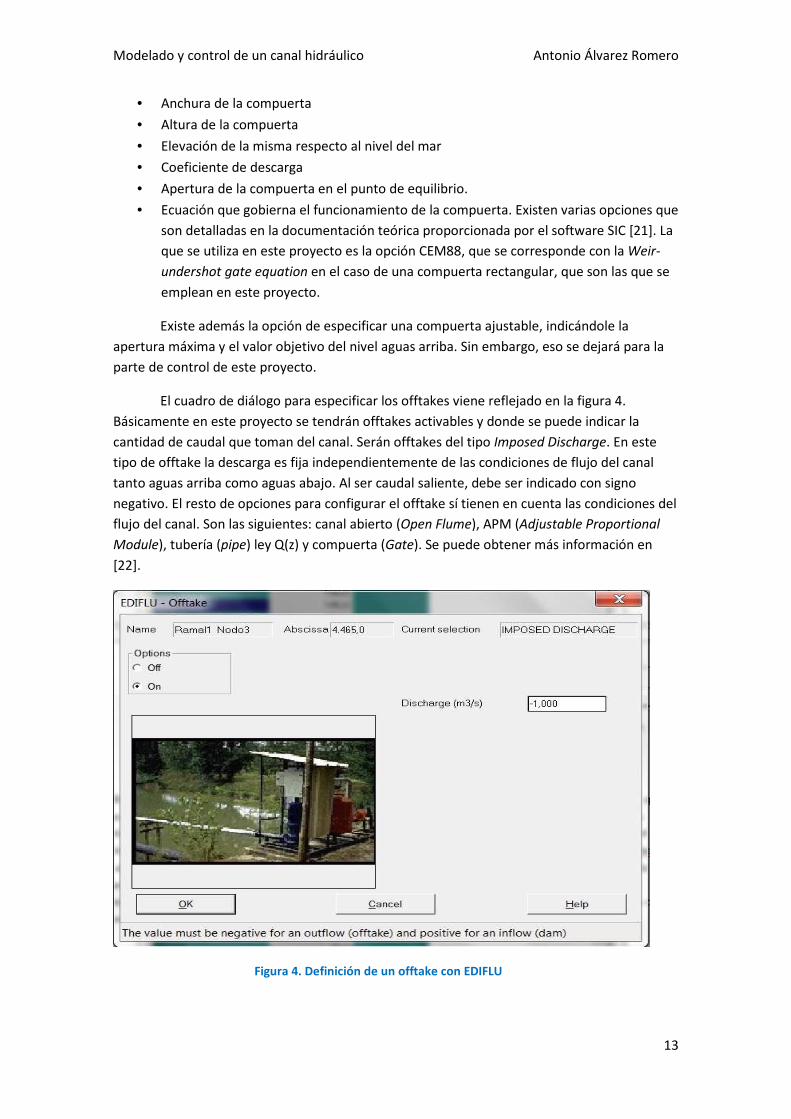
El cuadro de diálogo para especificar los offtakes viene reflejado en la figura 4.
Básicamente en este proyecto se tendrán offtakes activables y donde se puede indicar la
cantidad de caudal que toman del canal. Serán offtakes del tipo Imposed Discharge. En este
tipo de offtake la descarga es fija independientemente de las condiciones de flujo del canal
tanto aguas arriba como aguas abajo. Al ser caudal saliente, debe ser indicado con signo
negativo. El resto de opciones para configurar el offtake sí tienen en cuenta las condiciones del
flujo del canal. Son las siguientes: canal abierto (Open Flume), APM (Adjustable Proportional
Module), tubería (pipe) ley Q(z) y compuerta (Gate). Se puede obtener más información en
[22].
Figura 4. Definición de un offtake con EDIFLU

Modelado y control de un canal hidráulico Antonio Álvarez Romero
14
Es necesario especificar también en EDIFLU las condiciones de contorno en los nodos
finales del canal (nodos de descarga). También se puede configurar la precisión de los
parámetros de computación. Una vez se introducen los datos, se procede a su verificación. A
no ser que ocurra un error grave, se crea un fichero de extensión .DON que se usa para los
cálculos en flujo estable. De esta forma se tienen los elementos necesarios para invocar el
programa FLUVIA, también del módulo de régimen permanente, que se encarga de calcular el
perfil del flujo del sistema completo para condiciones de flujo estable, usando los archivos de
datos hidráulicos. Los resultados se representan en un archivo de extensión .SRF, que pueden
visualizarse de forma gráfica o en forma de valores numéricos. Para ello se usa el programa
RESFLU. En la figura 5 se muestra un perfil de agua en régimen permanente calculado con
FLUVIA y mostrado con RESFLU.
Figura 5. Curva de agua calculada con FLUVIA
2.3.3. Módulo de régimen transitorio o de flujo inestable
Las simulaciones en condiciones de flujo estable son la base para realizar simulaciones
de flujo inestable, o de régimen transitorio. En este módulo se introduce la variable tiempo
para las simulaciones, y se pueden definir cambios dinámicos en el escenario de simulación.
Por una parte, se puede indicar la evolución temporal de un offtake, indicando qué día y a qué
hora se produce un cambio en el caudal de agua tomado en ese offtake (figura6). Por otra
parte, se puede indicar la evolución temporal de la apertura de cada una de las compuertas
(figura 7), indicando también el día y la hora de la simulación en que se producen los cambios
en las aperturas. Una vez hecho esto se podría lanzar la simulación de flujo inestable. No
obstante, en este proyecto sólo se indicarán los cambios en los offtakes, ya que las compuertas
serán gobernadas por los controladores que se implementen y, por tanto, su evolución
temporal no estará especificada de antemano. La granularidad de estas especificaciones
vendrá marcada, como es lógico, por el tiempo de muestreo que se tome. La especificación de

Modelado y control de un canal hidráulico Antonio Álvarez Romero
15
cómo varían con el tiempo estos parámetros puede realizarse mediante la creación de un
fichero .SIR. En este fichero también se proporcionan datos fundamentales como son la
duración de la simulación y el tiempo de muestreo que se va a emplear.
De esta manera se puede simular el comportamiento del canal y detectar posibles
situaciones peligrosas como que el canal desborde en algún punto o se quede seco. El editor
que se utiliza para indicar las condiciones de la simulación es EDISIR, y una vez creado el
correspondiente fichero se puede invocar al programa SIRENE, también de este módulo para
realizar la simulación de estas condiciones. Cuando se invoca el programa SIRENE, es necesario
proporcionarle un fichero .GEO, generado anteriormente, un fichero .SIR, que es el que se ha
generado previamente con EDISIR, un fichero de regulación, de extensión .LST, y en caso de
emplear el módulo de regulación de SIC (que aplica en este caso, ya que se van a diseñar
controladores para el canal), se le proporciona un fichero .REG, con los parámetros de
regulación que se aplican en la simulación. En el siguiente apartado se hace una descripción
del módulo de regulación de SIC.
Figura 6. Especificación de la evolución de descarga de agua en un offtake mediante EDISIR
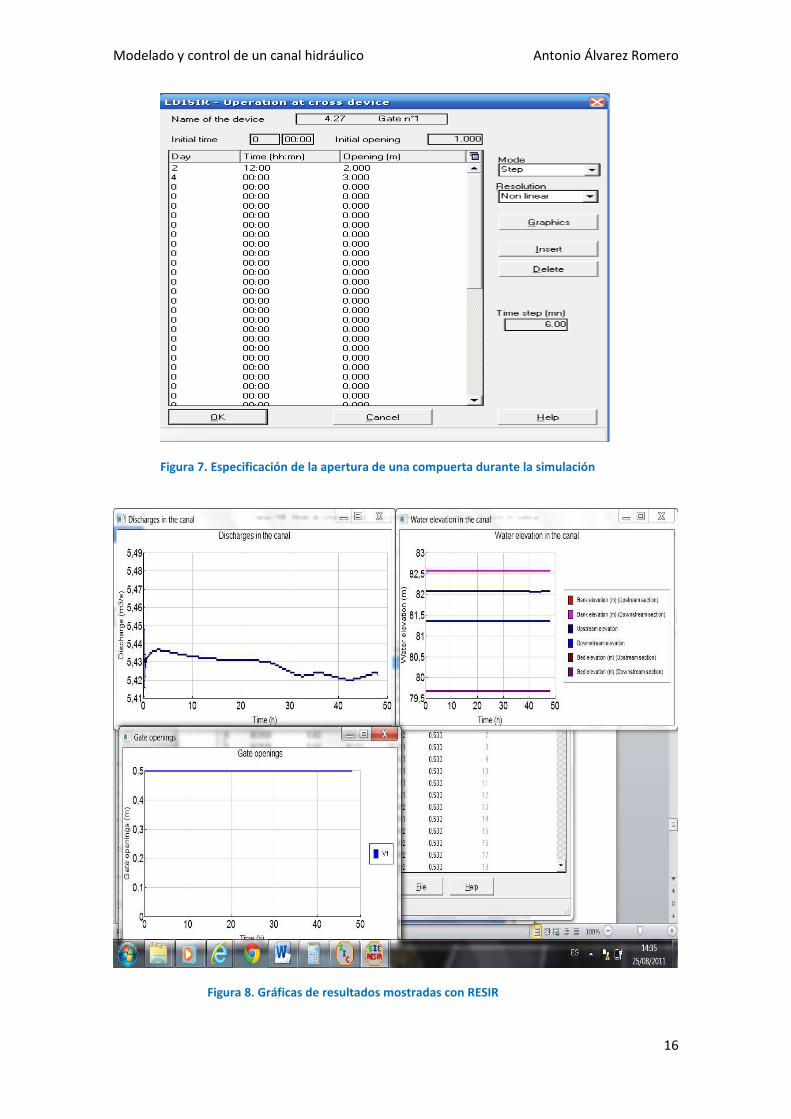
Una vez realizada la simulación los resultados se almacenan en un fichero de extensión
.RES, que puede emplearse para visualizarse de forma gráfica o simplemente ver los valores
numéricos. Para ello se emplea el programa RESIR, que también forma parte de este módulo.
RESIR ofrece resultados a nivel global y a nivel local, siendo posible ver la evolución temporal
para un punto determinado del nivel de agua o del caudal que pasa a través del mismo. Si se
consultan puntos donde hay compuertas también se muestra cómo varía la apertura de dichas
compuertas. En la figura 8 se puede ver cómo se muestran los resultados de la simulación en el
caso de un punto en el que se encuentra una compuerta.
Modelado y control de un canal hidráulico Antonio Álvarez Romero
16
Figura 7. Especificación de la apertura de una compuerta durante la simulación
Figura 8. Gráficas de resultados mostradas con RESIR

Modelado y control de un canal hidráulico Antonio Álvarez Romero
17
2.3.4. Módulo de regulación
Existe un módulo especial para el desarrollo de controladores automáticos para el
canal. El aspecto de este módulo se muestra en la figura 9. En este módulo se especifican los
siguientes datos:
Figura 9. Aspecto del módulo de regulación de SIC
• Ubicación de los lugares donde se realiza el control del canal. Normalmente son
compuertas o, en el caso del comienzo del canal, el lugar por donde fluye el caudal
entrante
• Si las variables de control se consideran en valor absoluto, relativo o por incrementos
• Relacionado con la primera, se especifica si la variable de control es la apertura de una
compuerta, el caudal…
• Se indica el valor máximo y mínimo de la variación que puede sufrir la señal de control
y el valor máximo y mínimo en valor absoluto que puede tener. No obstante, en este
proyecto no se especifican mediante el módulo de regulación, ya que los
controladores se implementan en Matlab, y todos estos parámetros quedan recogidos
en los ficheros .m desarrollados.
• Ubicación de los lugares a ser controlados. Normalmente lo que se controla es el nivel
de agua en ese lugar y el caudal que pasa por dicho punto. La variable controlada
puede ser expresada en valor absoluto, de forma incremental, en valor relativo
respecto a un punto de operación, con respecto al fondo del canal o con respecto a
una referencia.
• Cuál es la variable que se controla, ya se ha dicho que normalmente es el nivel de agua
o el caudal en el punto.

Modelado y control de un canal hidráulico Antonio Álvarez Romero
18
• Cuál es el cambio máximo que puede sufrir la señal de salida. Esto también se reserva
para el fichero Matlab, por lo que en este proyecto no se indica a través de esta
interfaz.
• Referencia para la salida. También se le indica por Matlab en este proyecto, pero el
programa ofrece la posibilidad de especificarla mediante el módulo de control.
• Finalmente, se especifican qué variables van a ser medidas y donde. Normalmente
coinciden con las controladas (salidas), lo que ocurre en este proyecto.
El software SIC ofrece una librería de controladores a aplicar, entre los que se
encuentra, por ejemplo, el PID. No obstante, es más cómodo implementar a medida un
controlador en Matlab y emplearlo gracias a la interfaz Matlab-SIC. Esta es una de las grandes
fortalezas de SIC, que permite la existencia de una interfaz en Matlab para el control mediante
el intercambio de información de 4 variables: valor de variable medida, valor de variable
controlada, valor de referencia y valor de variable de control. Durante la simulación, el fichero
de control implementado en Matlab es invocado en cada iteración, dando lugar a la
actualización de las variables. Esto se verá en la parte del proyecto dedicada a los
controladores implementados.
2.3.5. Dos aspectos fundamentales: el tiempo de muestreo y las limitaciones del
software
Un parámetro de trabajo fundamental es el tiempo de muestreo. Como quiera que el
buffer de muestras del que se dispone en la versión de SIC con la que se realiza este proyecto
es bastante limitado, eso implica que si se quiere un tiempo de muestreo bajo para capturar
bien determinadas dinámicas, no se podrán hacer simulaciones largas. De igual manera, si se
desean simulaciones largas, es necesario usar tiempos de muestreo mayores para no
desbordar el buffer de muestras. Por tanto, se tiene una limitación de trabajo importante y es
necesario alcanzar un compromiso entre duración de la simulación y tiempo de muestreo en
función de los intereses de cada momento concreto.
Pese a que se proporcionó una detallada descripción del canal de unas 300 secciones, no
se han podido incluir todas en el software empleado, ya que éste tiene limitaciones de
computación establecidas en 50 secciones y 10 offtakes, por lo que ha sido necesario realizar
una selección de las secciones más representativas.
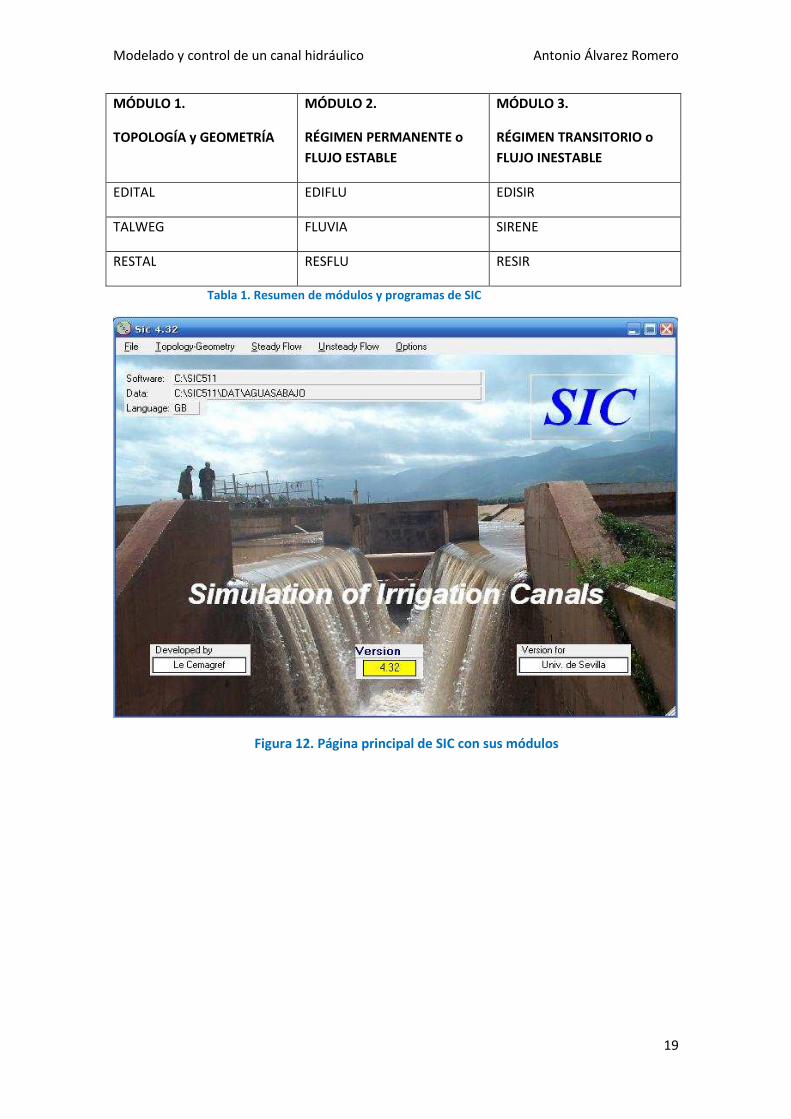
En la tabla 1 se puede ver el resumen de las aplicaciones disponibles en cada módulo de
SIC y en la figura 10 la pantalla principal de SIC, donde aparecen los desplegables de cada
módulo.
Modelado y control de un canal hidráulico Antonio Álvarez Romero
19
MÓDULO 1.
TOPOLOGÍA y GEOMETRÍA
MÓDULO 2.
RÉGIMEN PERMANENTE o
FLUJO ESTABLE
MÓDULO 3.
RÉGIMEN TRANSITORIO o
FLUJO INESTABLE
EDITAL EDIFLU EDISIR
TALWEG FLUVIA SIRENE
RESTAL RESFLU RESIR
Tabla 1. Resumen de módulos y programas de SIC
Figura 12. Página principal de SIC con sus módulos