2 - elementos finitos. sistemas discretos
TRANSCRIPT
5/11/2018 2 - Elementos Finitos. Sistemas Discretos - slidepdf.com
http://slidepdf.com/reader/full/2-elementos-finitos-sistemas-discretos 1/10
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
1111
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
2 . 1 . I N T R O D U C C I Ó N
Los procedimientos matriciales de mecánica estructural comparten un buen número de
operaciones con el MEF. Son similares los procedimientos de ensamblado de elementos
para formar la matriz de rigidez global, la imposición de condiciones de contorno o
soporte, la solución del sistema de ecuaciones y el procesamiento de elementos para
obtener las tensiones o deformaciones que en ellos aparecen.
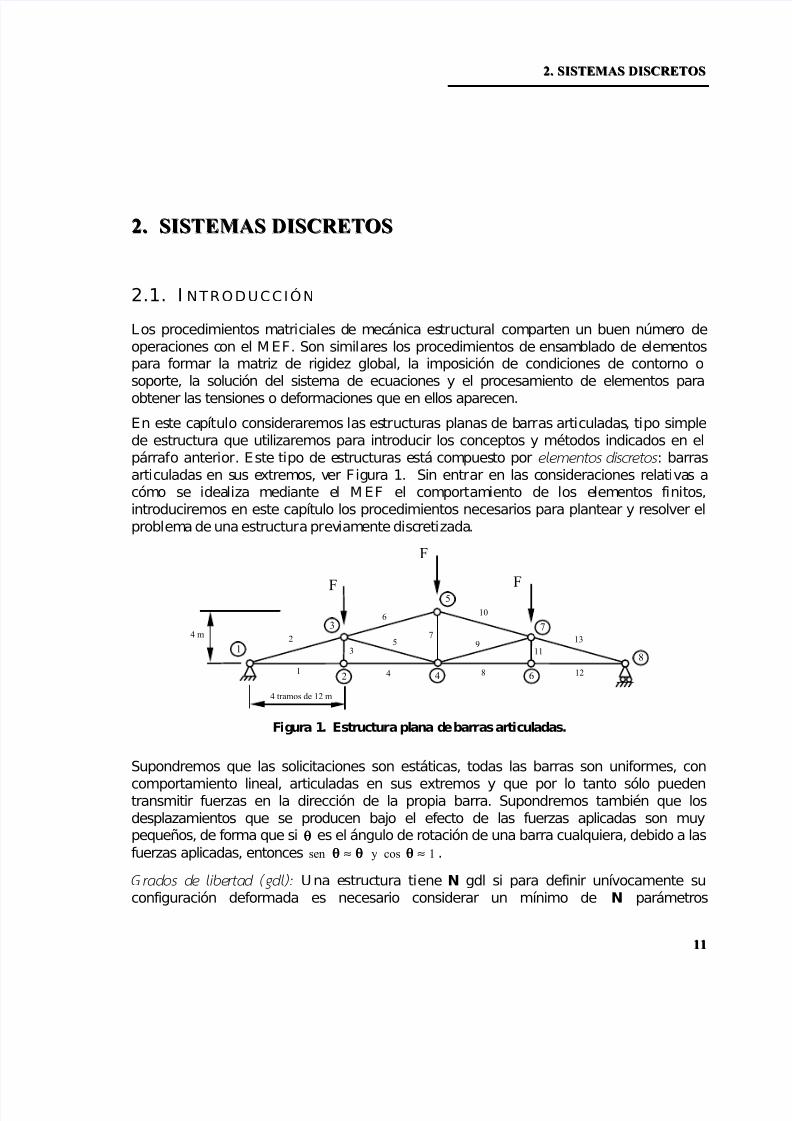
En este capítulo consideraremos las estructuras planas de barras articuladas, tipo simple
de estructura que utilizaremos para introducir los conceptos y métodos indicados en el
párrafo anterior. Este tipo de estructuras está compuesto por elementos discretos: barras
articuladas en sus extremos, ver F igura 1. Sin entr ar en las consideraciones relativas a
cómo se idealiza mediante el MEF el comportamiento de los elementos finitos,
introduciremos en este capítulo los procedimientos necesarios para plantear y resolver el
problema de una estructura previamente discretizada.
F
2
F
F5
6
7
4
3
2
18
1
3
6
5
4
10
9
8
11
13
12
7
4 tramos de 12 m
4 m
Figura 1. Estructura plana de barr as articuladas.
Supondremos que las solicitaciones son estáticas, todas las barras son uniformes, con
comportamiento lineal, articuladas en sus extremos y que por lo tanto sólo puedentransmitir fuerzas en la dirección de la propia barra. Supondremos también que los
desplazamientos que se producen bajo el efecto de las fuerzas aplicadas son muy
pequeños, de forma que si θθ es el ángulo de rotación de una barra cualquiera, debido a las
fuerzas aplicadas, ent onces 1 cos ysen ≈≈ θθθθθθ .
Grados de libertad (gdl): Una estructura tiene N gdl si para definir unívocamente su
configuración deformada es necesario considerar un mínimo de N parámetros
5/11/2018 2 - Elementos Finitos. Sistemas Discretos - slidepdf.com
http://slidepdf.com/reader/full/2-elementos-finitos-sistemas-discretos 2/10
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
1122
independ ientes. La matriz de rigidez de la estructura r elaciona las fuerzas aplicadas en los
gdl con los desplazamientos de los mismos.
[ ]{ } { }FUK = (Ec. 1)
donde [K] es la matriz de rigidez global de la estructura y {F} y {U} son los vectores defuerzas aplicadas y desplazamiento s producidos en los gdl respectivament e. E sta ecuación
define el comportamiento global de la estructura. La matriz de rigidez de la estructura
será por lo tanto de NxN. En el caso de una estructura plana de barras articuladas, la
configuración deformada de la misma se puede definir completamente mediante los
desplazamientos de sus extremos, que en definitiva definen los nodos de la estructura.
Cada nodo tiene dos gdl, corre spondientes a los desplazamientos u y v en las direcciones x
e y del sistema de coordenadas. Por lo tanto N será igual a dos veces el número de nodos
que p ueden desplazarse.
El significado físico de la matriz de rigidez [K] es el siguiente. La columna j de [K] es el
vector de fuerzas que debe aplicarse a los gdl para mantener un estado de deformación
con valor unidad en el desplazamiento del gdl j y cero en el resto de gdl. Una
interpretación idéntica puede hacerse con respecto a la matriz de rigidez de los elementos
[ ]ek , que relaciona las fuerzas externas aplicadas con los desplazamientos en los gdl del
elemento. Esta interpretación física permite, para elementos discretos sencillos, la
obtención directa de la matr iz de rigidez de los elementos.
2 .2 . E C U AC I O N E S D E E L E M E N T O
Para calcular la matriz de rigidez global de la estructura [K] es conveniente calcular
previamente las matrices de rigidez de cada uno de los elementos discretos que la
componen, [ ]e
k .
[ ]{ } { }eeef uk = (Ec. 2)
Donde [ ]ek es la matriz de rigidez del elemento, { }e
f el vector de fuerzas ap licadas en sus
gdl y { }eu el vector de d esplazamientos corre spondientes.
β
i
j
x
yL
u
v
β + ∆β
i
j
u i
u i.cosb.
q i
p i
q j
p j
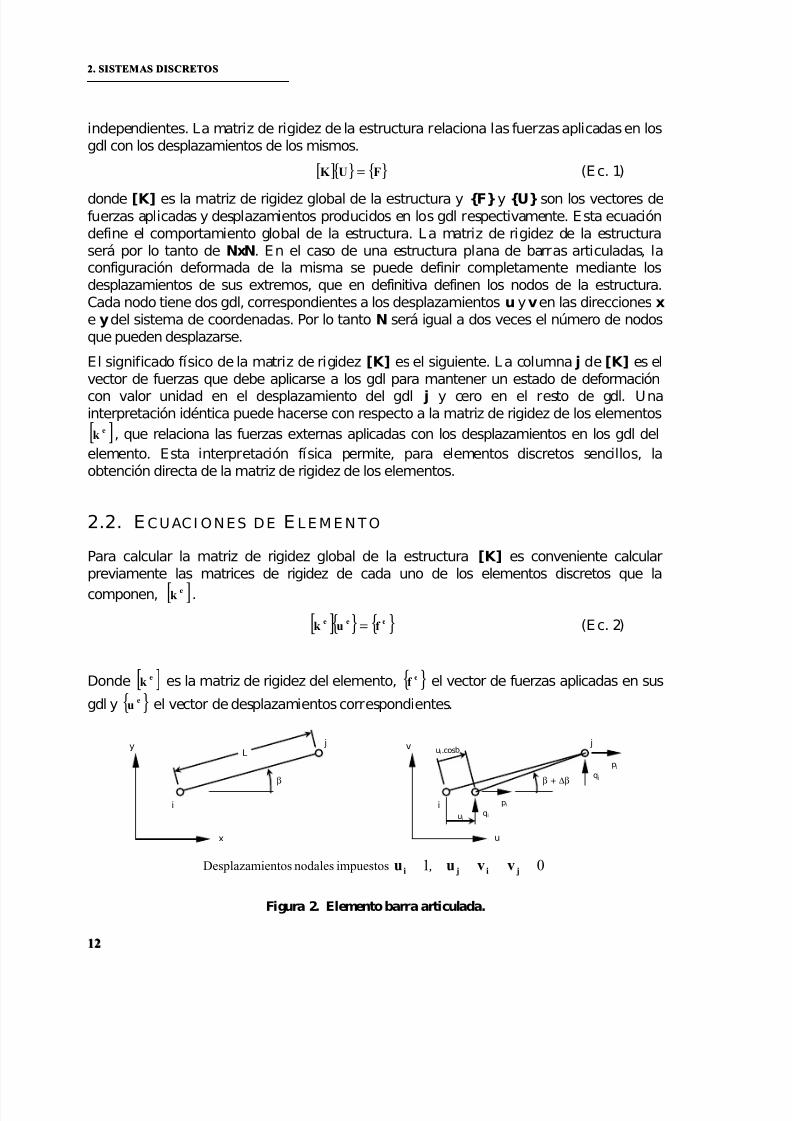
Desplazamientos nodales impuestos 01 ==== ji ji vvuu ,
Figura 2. Elemento barr a ar ticulada.
5/11/2018 2 - Elementos Finitos. Sistemas Discretos - slidepdf.com
http://slidepdf.com/reader/full/2-elementos-finitos-sistemas-discretos 3/10
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
1133
Considerese un elemento bar ra art iculada tal y como se muestra en la Figura 2. Este tipo
de elemento tiene un total de 4 gdl, desplazamientos u y v en las direcciones x e y en cada
uno de sus extremos. De esta forma la matriz de rigidez del elemento será de 4x4.
Supongase un módulo de elasticidad, E, del material y que el área transversal, A, de la
barra es constante. Para calcular la matriz de rigidez del elemento [ ]ek sólo es necesario
conocer E, A y las coordenadas de sus nodos ( )ii
yx , y j j yx , . Definimos en primer
lugar, en base a la geomet ría del elemento:
( ) ( )[ ]
L
xxc
L
yys
yyxxL
i j
i j
212
i j
2
i j
−==
−==
−+−=
ββ
ββ
cos
sen
/
(E c. 3)
Para calcular las columnas de la matriz de rigidez del elemento supondremos un
desplazamiento en un gdl, manteniendo nulos los desplazamientos de los gdl restantes.Las fuerzas exteriores necesarias para mantener tal configuración servirán para definir la
columna correspondiente de [ ]ek .
Consideremos en primer lugar el caso mostrado en la Figura 2: desplazamientoi
u . Este
desplazamiento produce un acortamientoi
cu de la barra (y un pequeño giro que se
considerará despreciable por la suposición de pequeños desplazamientos). Este
acortamiento debe equilibrarse por una fuerza de compresión de valor ( )i
cuLEAF / = ,
cuyas componentes en x e y son respectivamente Fcpp ji =−= y Fsqq
ji =−= . Estas
componen tes definen e l equilibrio estático, con lo que
=
−
−
j
j
i
i
i2
2
q
p
q
p
u
cs
c
cs
c
L
EA(E c. 4)
Este procedimiento se puede aplicar sucesivamente a los desplazamientos nodales
restantes j ji vuv y,, . Si todos los desplazamientos nodales pueden ser simultáneamente
no nulos, super poniendo los resultados, se obtiene :
=
−−
−−−−
−−
j
j
i
i
j
j
i
i
q
p
q
p
v
u
v
u
scsscs
csccsc
scsscs
csccsc
L
EA
22
22
22
22
(E c. 5)
con ββ cos=c y ββ sen=s .
De forma abr eviada la ecuación 5 puede escribirse como

5/11/2018 2 - Elementos Finitos. Sistemas Discretos - slidepdf.com
http://slidepdf.com/reader/full/2-elementos-finitos-sistemas-discretos 4/10
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
1144
[ ]{ } { }eeef uk = (Ec. 6)
que representa la ecuación matricial de comportamiento del elemento.
2 .3 . E N S AM B L AD O D E E L E M E N T O S
Aunque estemos considerando el caso del análisis de estructuras planas de barras
articuladas, el procedimiento de ensamblado depende muy poco del tipo de elemento
considerado, con lo cual el procedimiento es genera l.
Considerare mos el caso más simple en cuanto a fuerzas exteriores aplicadas. Supondre mos
que las únicas fuerzas exteriores que actúan están aplicadas directamente en los nodos.
Buscamos definir las ecuaciones de comportamiento globales de la estructura sobre la
base de las ecuaciones de comportamiento de cada elemento. Tendremos pues que
considera r en este proceso las condiciones de equilibrio estático y las de compatibilidad de
desplazamientos.
Para definir el proceso de ensamblado es conveniente considerar conceptualmente la
expansión de las matrices de element o al tamaño global del problema. Para ello definimos
{U} como el vector cuyas componentes son los desplazamientos nodales de todos los gdl
de la estructura. De esta forma, la matriz de rigidez expandida del elemento [ ]eK se
formará a partir de los elementos de la matriz, [ ]ek , posicionándolos según la numeración
global de los gdl de la estructura. De la misma forma se expandirá el vector { }ef a { }e
F .
Para que todos los nodos de la estructura estén en equilibrio estático es necesario que el
conjunto de fuerzas que inciden en cada uno de ellos sea igual a la fuerza exterior
aplicada. Las fuerzas que actúan en cada elemento están definidas por el vector { }e
F , quesegún la ecuación 6 es igual a [ ]{ }ee
UK . Definiendo {F} como el vector (tamaño de la
estructura global) que contiene todas las fuerzas externas aplicadas
{ } { } { } [ ]{ }∑∑==
=→=ee n
1e
en
1e
eUKFFF (Ec. 7)
donde n e es el número de elementos que componen la estructura. Si definimos
[ ] [ ]∑=
=en
1e
eKK (Ec. 8)
se obtiene la ecuación matricial de comportamiento global de la estructura.
[ ]{ } { }FUK = (Ec. 9)
En el proceso de ensamblado no es necesario expandir realmente la matriz de rigidez de
cada elemento. Se puede entender el proceso de ensamblado partiendo de una matriz [ ]K
nula de NxN a la que se va añadiendo la contribución de cada elemento, considerando las
posiciones definidas por sus gdl globales.
5/11/2018 2 - Elementos Finitos. Sistemas Discretos - slidepdf.com
http://slidepdf.com/reader/full/2-elementos-finitos-sistemas-discretos 5/10
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
1155
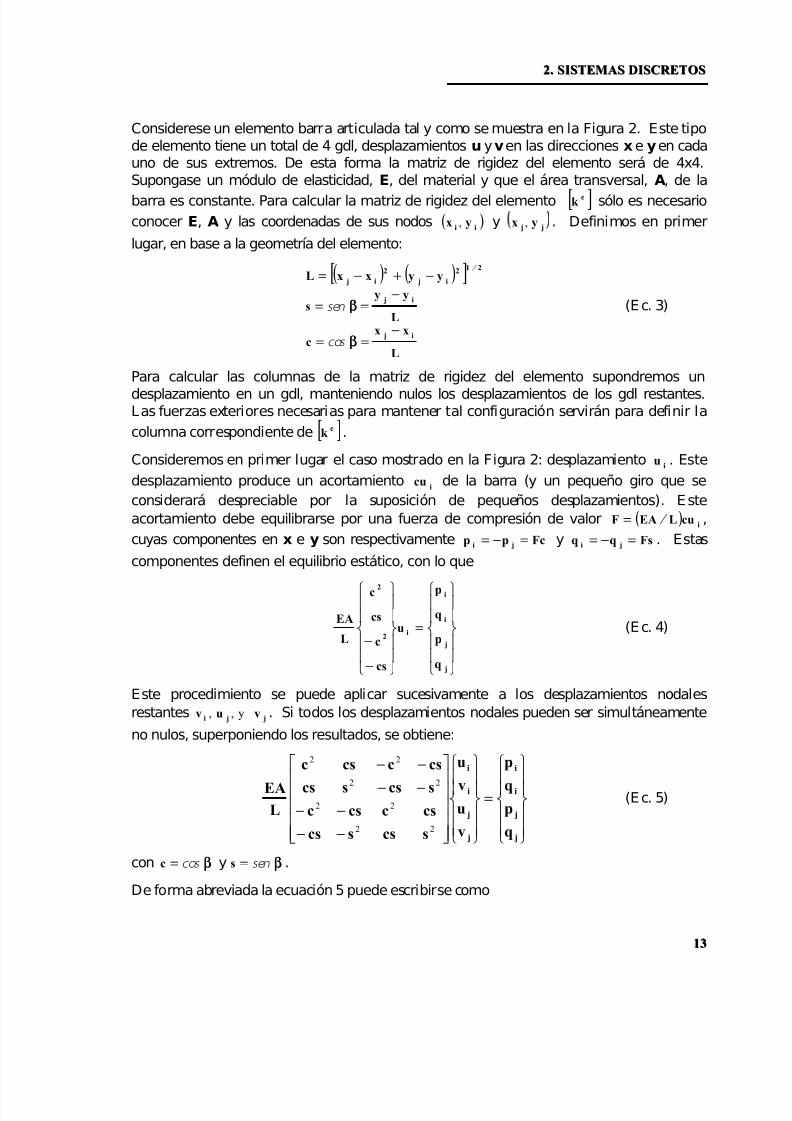
La numeración global de los grados de libertad de la estructura de la figura 1 se presenta
en la figura 3. Y en la figura 4 se presenta el cálculo de la matr iz de rigidez de la barra 1
de esta estructura asumiendo un valor para el módulo de elasticidad del material, E, y una
sección tra nsversal, A, como se indican en la tab la 1. Obsérvese que los índices de la
matriz de rigidez del elemento se ha n hecho corre sponder con la num eración global de losgrados de libertad de la estructura para el posterior ensamblado del sistema.
2
1
3
6
5
4
10
9
8
11
13
12
7
Figura 3. Numeración global de los gra dos de libertad.
Tabla 1. Da tos del elemento 1 de la estructura ( ver figura 1).
elem xi yi x j y j L (Ec. 3) c (Ec. 3) s (Ec. 3) A E
1 0 0 12 4 12.6491 0.9487 0.3162 0.002 207*105
1
2
5
6
(0, 0)
(12, 4)
−−
−−
−−−−
=
=
5555
5555
5555
5555
1
66
1
65
1
42
1
41
1
56
1
55
1
32
1
31
1
26
1
25
1
22
1
21
116
115
112
111
1
1052700105810110527001058101
1058101107429410581011074294
1052700105810110527001058101
1058101107429410581011074294
*.*.*.*.
*.*.*.*.
*.*.*.*.
*.*.*.*.
kkkk
kkkk
kkkk
kkkk
k
Figura 4. Matr iz de rigidez del elemento 1 de la estr uctura (ver figuras 1 y 3).
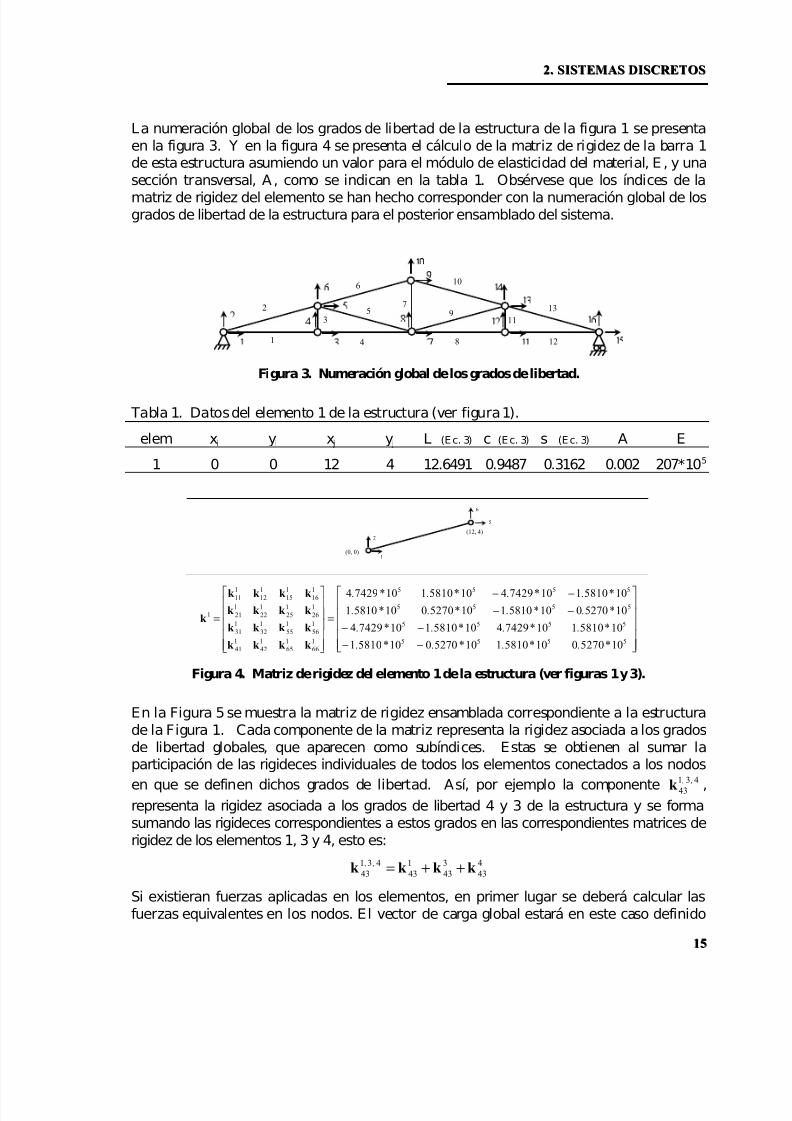
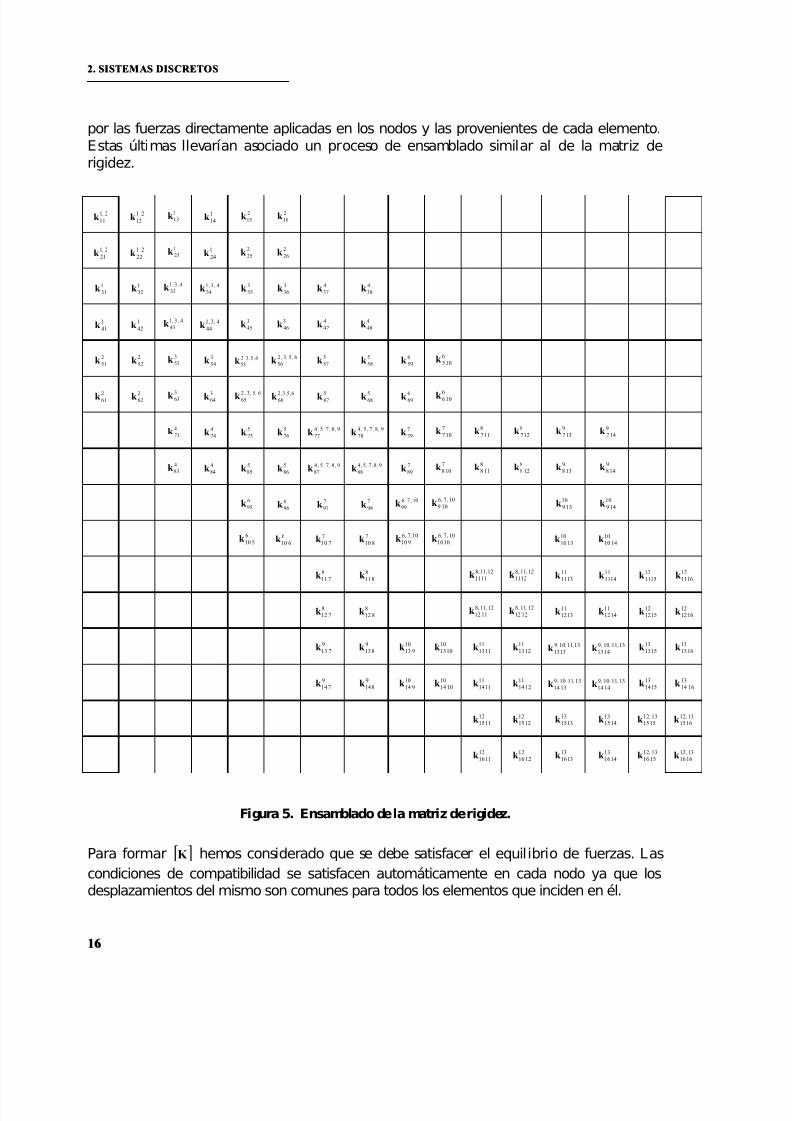
En la Figura 5 se muestra la matriz de rigidez ensamblada correspondiente a la estructura
de la Figura 1. Cada componente de la matriz representa la rigidez asociada a los grados
de liberta d globales, que apar ecen como subíndices. Estas se obtienen al sumar la
participación de las rigideces individuales de todos los elementos conectados a los nodos
en que se definen dichos grados de libertad. Así, por ejemplo la component e 43143 , ,k ,
representa la rigidez asociada a los grados de libertad 4 y 3 de la estructura y se forma
sumando las rigideces correspondiente s a estos grados en las correspondientes mat rices de
rigidez de los elementos 1, 3 y 4, esto es:
4
43
3
43
1
43
431
43kkkk ++= , ,
Si existieran fuerzas aplicadas en los elementos, en primer lugar se deberá calcular las
fuerzas equivalentes en los nodos. El vector de carga global estará en este caso definido
5/11/2018 2 - Elementos Finitos. Sistemas Discretos - slidepdf.com
http://slidepdf.com/reader/full/2-elementos-finitos-sistemas-discretos 6/10
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
1166
por las fuerzas directamente aplicadas en los nodos y las provenientes de cada elemento.
Estas últimas llevarían asociado un proceso de ensamblado similar al de la matriz de
rigidez.
21
11
,k 21
12
,k
1
13k 1
14k2
15k 2
16k
21
21
,k 21
22
,k
1
23k 1
24k2
25k 2
26k
1
31k 1
32k431
33
, ,k 431
34
, ,k 3
35k 3
36k 4
37k 4
38k
1
41k 1
42k431
43
, ,k 431
44
, ,k
3
45k 3
46k 4
47k 4
48k
2
51k 2
52k3
53k 3
54k 6532
55
, , ,k6532
56
, , ,k 5
57k 5
58k 6
59k6
105k
2
61k 2
62k 363
k 3
64k 653265
, , ,k 6532
66
, , ,k 5
67k 5
68k 6
69k 6106
k
4
73k 4
74k 5
75k 5
76k 98754
77
, , , ,k 98754
78
, , , ,k 7
79k7
107k 8
117k 8
127k 9
137k 9
147k
4
83k 4
84k 5
85k 5
86k 98754
87
, , , ,k 98754
88
, , , ,k 7
89k7
108k 8
118k 8
128k 9
138k 9
148k
6
95k 6
96k 7
97k 7
98k1076
99
, ,k1076
109
, ,k 10
139k 10
149k
6
510k 6
610k 7
710k 7
810k1076
910
, ,k 1076
1010
, ,k 10
1310k 10
1410k
8
711k 8
811k
12118
1111
, ,k 12118
1211
, ,k 11
1311k 11
1411k 12
1511k 12
1611k
8
712k 8
812k
12118
1112
, ,k 12118
1212
, ,k 11
1312k 11
1412k 12
1512k 12
1612k
9
713k 9
813k 10
913k 10
1013k 11
1113k 11
1213k 1311109
1313
, , ,k 1311109
1413
, , ,k13
1513k 13
1613k
9
714k 9
814k 10
914k 10
1014k 11
1114k 11
1214k 1311109
1314
, , ,k 1311109
1414
, , ,k13
1514k 13
1614k
12
1115k 12
1215k 13
1315k 13
1415k 1312
1515
,k 1312
1615
,k
12
1116k 12
1216k 13
1316k 13
1416k 1312
1516
,k 1312
1616
,k
Figur a 5. Ensam blado de la matr iz de rigidez.
Para formar [ ]K hemos considerado que se debe satisfacer el equilibrio de fuerzas. Las
condiciones de compatibilidad se satisfacen automáticamente en cada nodo ya que los
desplazamientos del mismo son comunes para todos los elementos que inciden e n él.
5/11/2018 2 - Elementos Finitos. Sistemas Discretos - slidepdf.com
http://slidepdf.com/reader/full/2-elementos-finitos-sistemas-discretos 7/10
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
1177
2 . 4 . P R O P I E D AD E S D E L A M AT R I Z D E R I G I D E Z G L O B AL
La matriz de rigidez global de la estructura tiene ciertas propiedades que pueden ser muy
útiles tanto para seleccionar métodos numéricos para su resolución como procedimientos
de almacenamiento, etc.
En primer lugar hay que indicar que la matriz de rigidez [ ]K es simétrica. Esto puede
comprobarse a partir del ejemplo presentado. Las matrices de rigidez de elemento [ ]ek
son simétricas, las expandidas [ ]eK también lo serán y en consecuencia la matriz global
(ensamblada a partir de las de los elementos) será también simétrica. El Teorema de
Reciprocidad de Maxwell-Betti define esta prop iedad de forma más general.
Otra característica importante de la matriz [ ]K es que e s semidefinida positiva. Una ma triz
se dice que es semidefinida positiva si para cualquier vector { }U arbitrario, diferente d el
nulo, { } [ ]{ } 0UKUT ≥ . En este caso, la expresión { } [ ]{ }UKU
Trepresenta el doble de la
energía de deformación almacenada en la estructura en el estado definido por el vector
{ }U . Por de finición, la energía de deformación es siempre positiva, con lo que la matriz
[ ]K es semidefinida positiva. La energía almacenada será nula para un vector de
desplazamientos nodales { }U si tal vector representa una configuración en la que no
existen deformaciones. Esto puede ocurrir si el sistema discreto es un mecanismo. Otra
posibilidad es que existan movimientos de cuerpo rígido, en los que toda la estructura se
desplaza o gira sin que se produzcan deformaciones. En general, para realizar el análisis
será necesario considerar las restricciones o soportes de la estructura de forma que [ ]K no
sea singular. Si éstos son suficientes para eliminar los movimientos de cuerpo rígido, la
matriz de rigidez resultant e será definido positiva.
Por último, la matriz de rigidez global tiene gran parte de sus coeficientes nulos, y
mediante una numeración correcta de los gdl tales coeficientes pueden agruparse en
ciertas zonas de la matriz de rigidez. La forma de agrupamiento más sencilla de los
coeficiente s nulos es la que produce matr ices en banda, es decir, matrices en las que todos
los coeficientes ijK son nulos para
bsi j +> . A sb se le denomina semiancho de banda. Si
tenemos un semiancho de banda pequeño en comparación con el número total de gdl,
podremos disminuir notablemente las necesidades de almacenamiento de los coeficientes
de [ ]K , considerando únicamente los contenidos en el semiancho de banda. Además, en la
resolución del sistema de ecuaciones resultante operaremos exclusivamente con los
coeficientes no nulos, haciendo má s eficientes los algoritmos de resolución.
Un coeficiente ijK de la matriz de rigidez global será nulo si no existe ningún elemento
que conecte los gdl asociados a i y j. Esto es debido a que [ ]K se forma mediante el
ensamblado de mat rices de element o. A la vista de e sto, si variamos la numeración de los
gdl (asociada a la de los nodos) variaremos la posición de los coeficientes nulos.
Conseguiremos un semiancho de banda mínimo cuando la máxima diferencia entre los
números de gdl que conecta cualquier elemento sea mínima. Cuando el número de grados
de libertad es elevado o el sistema a modelar es complejo, no es sencillo predefinir la
5/11/2018 2 - Elementos Finitos. Sistemas Discretos - slidepdf.com
http://slidepdf.com/reader/full/2-elementos-finitos-sistemas-discretos 8/10
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
1188
numeración óptima. Por este motivo, los programas de elementos finitos incorporan
algoritmos de renumeración destinados a generar una numeración eficiente.
2 .5 . AP L I C AC I Ó N D E C O N D I C I O N E S D E CO N T O R N O .R E S O L U CI Ó N E N D E S P L A Z A M I E N T O S
Como se ha comentado en el apartado anterior, la matriz de rigidez global [ ]K es singular
y en consecuencia no existe una única solución de la ecuación [ ]{ } { }FUK = . Será por lo
tanto necesario simular las condiciones de contorno reales de la estructura, con lo que en
general e liminaremos la singularidad. Existen diversos tipos de condiciones de contorno a
aplicar, aunque en este apartado únicamente consideraremos la más sencilla que consiste
en suponer que ciertos desplazamientos nodales son nulos (soporte s).
Para considerar tal tipo de condiciones de contorno supongamos que subdividimos los
grados de libertad globales de la estructura en dos grupos: los que están re stringidos, { }rU
(desplazamiento nulo), y los libres, { }l
U . De esta forma
{ }
=r
l
U
UU (E c. 10)
Subdividiendo la matriz de rigidez global [ ]K y el vector de fuerzas aplicadas { }F de forma
análoga.
=
r
l
r
l
rrrl
lrll
F
F
U
U
KK
KK(E c. 11)
La pr imera de las dos ecuaciones mat riciales descritas por la ecuación 11 es
[ ]{ } [ ]{ } { }lrlrlll
FUKUK =+ (E c. 12)
y si consideramos que { } 0Ur= , resulta un sistema de ecuaciones lineales del que es
posible obtener el vector de desplazamientos libres { }l
U . La matriz de coeficiente s de tal
sistema de ecuaciones es la correspondiente global del sistema en la que no se han
ensamblado las rigideces asociadas a los grados de libertad con desplazamiento nulo. De
la segunda ecuación se obtiene
[ ]{ } [ ]{ } { }rrrrlrl
FUKUK =+ (E c. 13)
Calculados los desplazamientos libres{ }lU con la ecuación 12, mediante la ecuación 13 es
posible calcular las fuerzas que aparecen en los desplazamientos de los gdl restringidos
(reacciones { }r
F ), de forma que se satisfaga el equilibrio.

5/11/2018 2 - Elementos Finitos. Sistemas Discretos - slidepdf.com
http://slidepdf.com/reader/full/2-elementos-finitos-sistemas-discretos 9/10
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
1199
2 . 6 . CAL C UL O D E T E N S I O N E S
En el ejemplo sencillo que nos ocupa, las tensiones que aparecen en cualquier elemento
barra serán únicamente uniaxiales (tracción o compresión). Calculados los
desplazamientos nodales, { }U , es inmediato el cálculo de la variación de longitud, L∆ , de
cualquier barr a
( ) ( )[ ]LLL
yyxxL
vyyuxx
vyyuxx
f
i ji jf
j j j j j j
iiiiii
−=∆
−+−=
+=+=
+=+=
2122 /
' ' ' '
' '
' '
(E c. 14)
donde ( )ii
yx , y j j
yx , son las coordenadas de los nodos del elemento; ( )ii vu , y j j vu ,
son los desplazamientos en las direcciones en el sistema de referencia xy los cuales se
extrae n de la solución { }U y, L , es la longitud inicial del elemento (Ec. 3).
Y en base a su módulo de e lasticidad se pueden calcular la tensión a la que e stá sometida.
L
EL ⋅∆=σ (E c. 15)
2 . 7 . R E S U M E N D E L P R O C E D I M I E N T O D E AN Á L I S I S
Las fases computacionales fundamentales de un análisis lineal estático mediante el
método de los elementos finitos se pue den r esumir en las siguientes:
i) Entrada de datos e inicialización. Se entr an los datos de número de nodos y
elementos, coordenadas nodales, definición de los elementos mediante los nodos que
conecta, propiedades de material, fuerzas actuantes, condiciones de contorno, etc. Se
define el tamaño global del problema y se reserva e inicializa el almacenamiento para
los diferentes vectores y matrices.
ii) Cálculo de ecuaciones de comportamiento de todos los elementos. Para cada
elemento se calcula su matriz de r igidez [ ]ek y el vector de fuerzas equivalentes en los
nodos de las directamente aplicadas sobre el elemento { }ef , si es que existen.
iii) Ensamblado de la estructura . Se ensambla la matriz global de la estructura a par tir de
las matrices de rigidez de los elementos [ ]e
k . También se ensambla el vector defuerzas externas aplicadas { }F a partir de la contribución de las fuerzas actuantes en
los elementos { }ef y las directamente aplicadas en los nodos. Se aplican las
condiciones de contorno, si éstas no se han aplicado directamente en el proceso de
ensamblado.
iv) Resolver el sistema de ecuaciones [ ]{ } { }FUK = para calcular { }U .
5/11/2018 2 - Elementos Finitos. Sistemas Discretos - slidepdf.com
http://slidepdf.com/reader/full/2-elementos-finitos-sistemas-discretos 10/10
22.. SSIISSTTEEMMAASS DDIISSCCRREETTOOSS
2200
v) Cálculo de tensiones. Para cada elemento se extrae de { }U el vector de
desplazamientos nodales de cada elemento { }eu . A partir de este vector de
desplazamientos se pueden calcular las tensiones que aparecen en cada elemento.
Las fases anteriores describen un programa básico, sin preprocesadores opostprocesadores, numeración automática de nodos, y otras facilidades de utilización.
También es posible modificar ligeramente el proceso para mejorar su eficiencia
computacional.