01100011010011100 01 1 # 0100 # 1100 introducciÓn al ...ramon/mecsol/tema7.pdf · 42 5 13...
TRANSCRIPT
4251
3
0011 0010 1010 1101 0001 0100 1011
INTRODUCCIÓN AL MÉTODO
DEL ELEMENTO FINITO

4251
3
0011 0010 1010 1101 0001 0100 1011
El método del elemento finito es una técnica numérica para resolver problemas que se pueden describir por ecuaciones diferenciales parciales o que pueden ser formulados por medio de una minimización de un funcional (cálculo variacional). El método del elemento finito es una herramienta de análisis muy poderosa que permite obtener soluciones aproximadas a una amplia variedad de problemas de mecánica en el continuo. La premisa básica es que una región de solución puede ser modelada analíticamente reemplazándola con un arreglo de elementos discretos. Esto permite reducir un número infinito de incógnitas del problema a uno con un número finito de incógnitas. Por otro lado, el método también permite variar las condiciones (parámetros elásticos, viscosidad, densidad, temperatura, etc.) de los elementos individualmente o en grupos de acuerdo a las ecuaciones constitutivas que se empleen en el problema.

4251
3
0011 0010 1010 1101 0001 0100 1011
Ejemplos de visualización de resultados.
X
Y
Z
AA ABBA B CA
C
A B CDA
B D CA E
D B C EFDA B E CF
DE CG DF EGCDBA DH EFG EC F DB
H
A
E G
DD HFED CGCB FGC E BA D FB
C
E AD
BCE AD
A
B C
BDA CA BA
AB CA B
http://ceaspub.eas.asu.edu/structures/FiniteElementAnalysis.htm
4251
3
0011 0010 1010 1101 0001 0100 1011
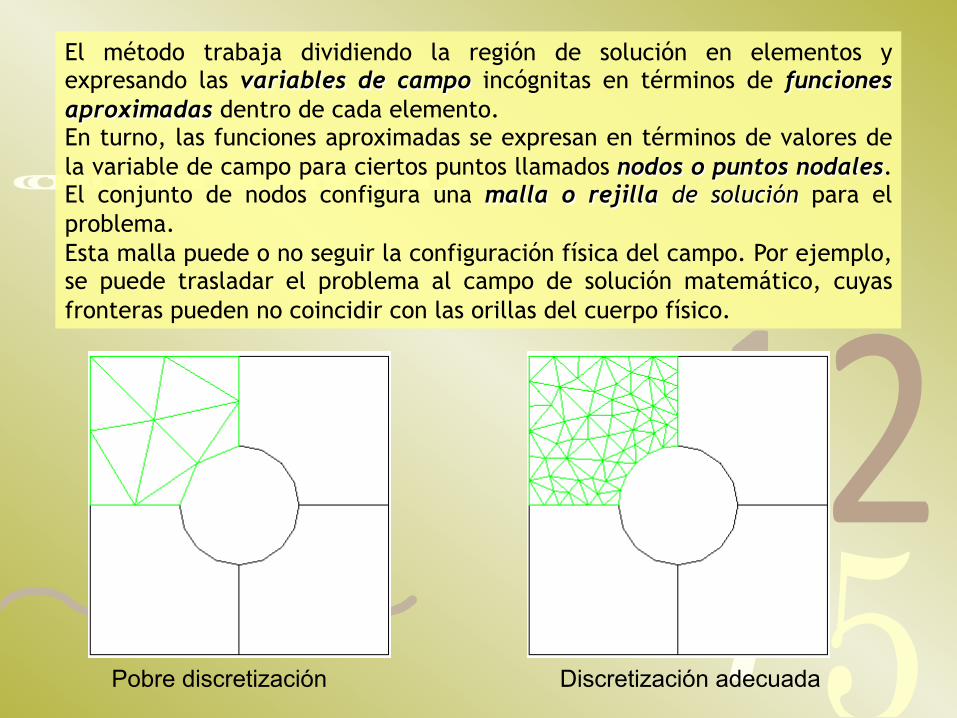
El método trabaja dividiendo la región de solución en elementos y expresando las variables de campo incógnitas en términos de funciones aproximadas dentro de cada elemento. En turno, las funciones aproximadas se expresan en términos de valores de la variable de campo para ciertos puntos llamados nodos o puntos nodales. El conjunto de nodos configura una malla o rejilla de solución para el problema. Esta malla puede o no seguir la configuración física del campo. Por ejemplo, se puede trasladar el problema al campo de solución matemático, cuyas fronteras pueden no coincidir con las orillas del cuerpo físico.
Pobre discretización Discretización adecuada

4251
3
0011 0010 1010 1101 0001 0100 1011
Existen básicamente cuatro maneras de formular las ecuaciones del sistema: 1. Aproximación directa. Las ecuaciones del sistema se ensamblan directamente de las ecuaciones que gobiernan el problema. Desventaja: Sólo se pueden analizar elementos de formas o geometrías simples. 2. Aproximación Variacional. En esta alternativa, se requieren usar funciones obtenidas del cálculo variacional, es decir, encontrando los valores extremos de un funcional (por ej. la Energía Potencial). Ventaja: Se pueden usar formas de elementos tanto simples como complejas.
4251
3
0011 0010 1010 1101 0001 0100 1011
3. Aproximación de Residuales Pesados (Weighted Residuals). En esta forma se traslada el problema del campo de solución físico al campo de solución puramente matemático. Ventaja: Puede aplicarse en problemas donde no se cuenta con un funcional adecuado. 4. Aproximación de Balance de Energía. (Muy empleado en casos de mecánica de sólidos) Se basa en el balance de la energía térmica o mecánica del sistema. Ventaja: Igual al anterior.

4251
3
0011 0010 1010 1101 0001 0100 1011
En una aproximación de solución a los desplazamientos, el error de discretización introducido al suponer un polinomio como función de interpolación es del orden de:
donde h es el tamaño del elemento y p es el orden del polinomio que se usa en la interpolación.
( 1)( )pO h +

4251
3
0011 0010 1010 1101 0001 0100 1011
Lo anterior se debe a que mientras mayor sea el número de elementos empleado (reduciendo, por tanto, el tamaño de los mismos) tendremos una mejor aproximación a la solución exacta del problema. Por ejemplo, en el caso de problemas de elasticidad plana (podría un caso ser deformación plana), donde se puede suponer una expansión lineal, por lo tanto una interpolación lineal (p = 1) podemos esperar una convergencia del orden de:
es decir, el error en desplazamiento se reduciría a 1/4 , si reducimos el espacio entre nodos a la mitad (1/2).
2( )O h
4251
3
0011 0010 1010 1101 0001 0100 1011
Por otro lado, los esfuerzos y las deformaciones, los cuales corresponden a la mésima derivada del desplazamiento, convergen con un error del orden de:
( 1 )( )p mO h + −

4251
3
0011 0010 1010 1101 0001 0100 1011
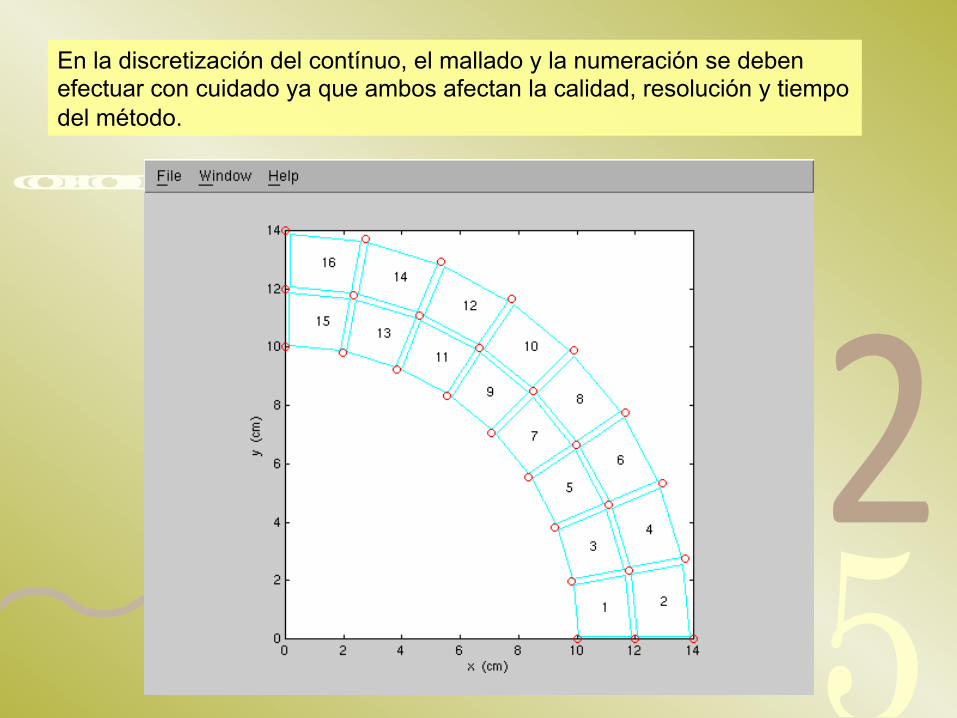
Pasos a seguir (de manera general y a manera de receta) para encontrar la solución a un problema del continuo usando el MEF. 1. Discretizar el continuo 2. Seleccionar funciones de interpolación apropiadas 3. Encontrar las propiedades de los elementos (ecuaciones que relacionan las condiciones de los elementos con la solución buscada, p.ej. ecuaciones fuerza-desplazamiento en caso de elasticidad), se emplea uno de los cuatro procedimientos. 4. Ensamblar las propiedades de los elementos para formar las ecuaciones del sistema (trasladar las ecuaciones del esquema local, por elemento, al esquema global, del sistema) 5. Modificar las ecuaciones del sistema para tomar en cuenta las condiciones de frontera. 6. Resolver el sistema de ecuaciones. 7. Desplegar los resultados en manera gráfica conveniente
4251
3
0011 0010 1010 1101 0001 0100 1011
En la discretización del contínuo, el mallado y la numeración se deben efectuar con cuidado ya que ambos afectan la calidad, resolución y tiempo del método.
4251
3
0011 0010 1010 1101 0001 0100 1011
4251
3
0011 0010 1010 1101 0001 0100 1011
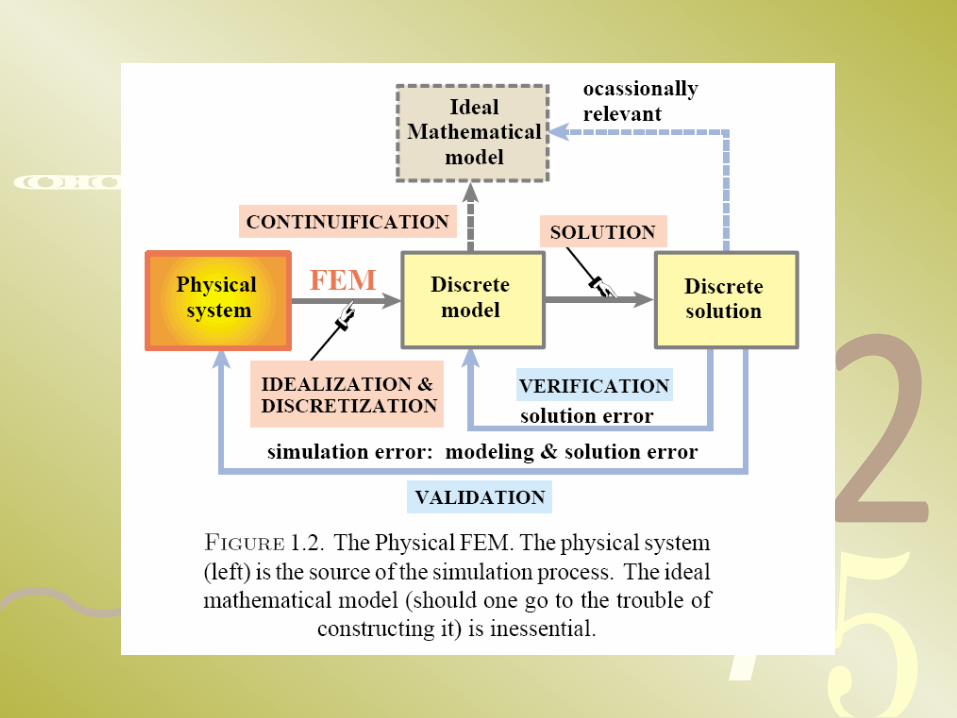
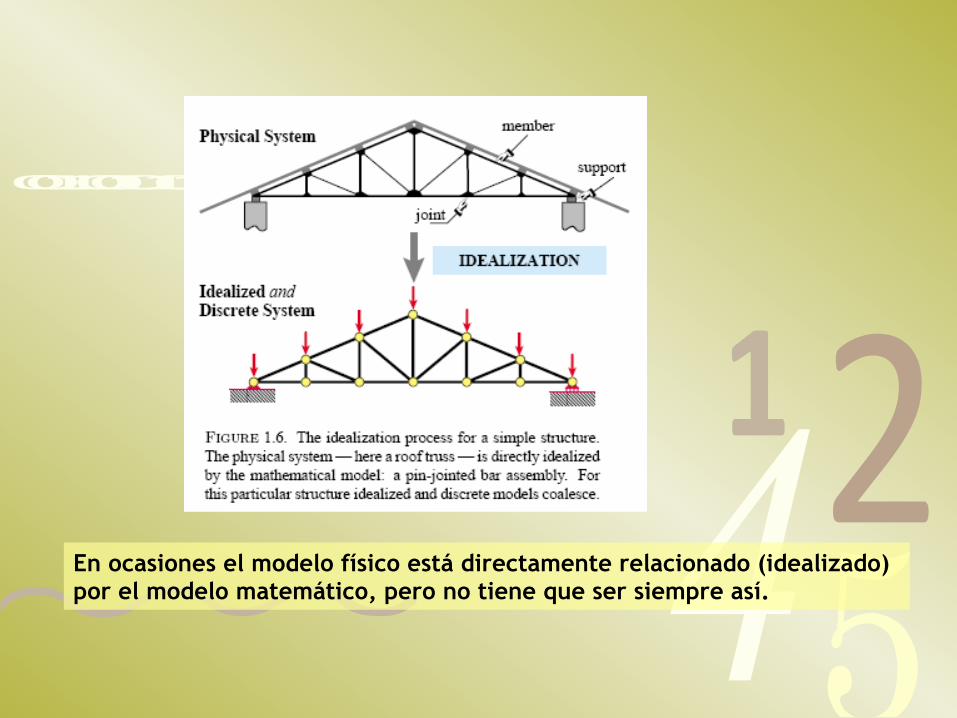
En ocasiones el modelo físico está directamente relacionado (idealizado) por el modelo matemático, pero no tiene que ser siempre así.
4251
3
0011 0010 1010 1101 0001 0100 1011
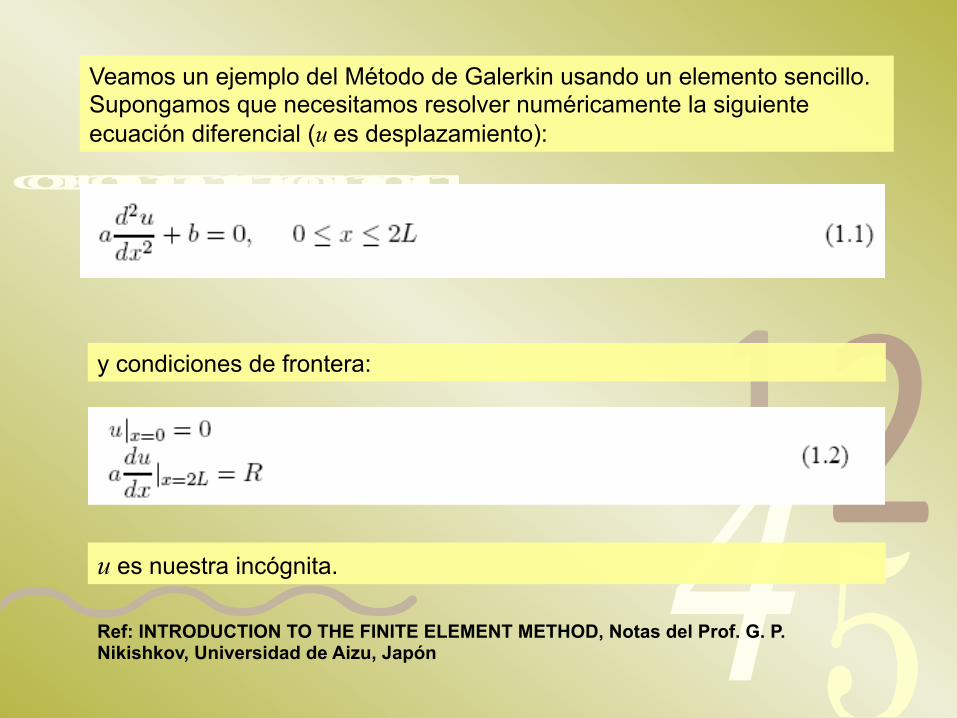
Veamos un ejemplo del Método de Galerkin usando un elemento sencillo. Supongamos que necesitamos resolver numéricamente la siguiente ecuación diferencial (u es desplazamiento):
y condiciones de frontera:
u es nuestra incógnita.
Ref: INTRODUCTION TO THE FINITE ELEMENT METHOD, Notas del Prof. G. P. Nikishkov, Universidad de Aizu, Japón

4251
3
0011 0010 1010 1101 0001 0100 1011
Usaremos dos elementos unidimensionales como los de la figura:
Primero, consideremos el elemento finito de la derecha. Este elemento tiene dos nodos. Una aproximación de la función u(x) puede efectuarse de la siguiente manera:

4251
3
0011 0010 1010 1101 0001 0100 1011
donde Ni son conocidas como funciones de interpolación o forma (shape functions)
Las cuales se emplean para interpolar u(x) usando sus valores nodales. Los valores nodales u1 y u2 son incógnitas que deben ser determinadas por la discretización global del sistema. Después de sustituir u expresada por medio de sus valores nodales y funciones de forma, la ecuación diferencial nos queda:

4251
3
0011 0010 1010 1101 0001 0100 1011
donde ψ es un residual diferente de cero debido a la representación aproximada de la función dentro del elemento. El método de Galerkin minimiza el residual por medio de multiplicar los términos de la ecuación anterior por las funciones de forma, integrar sobre el elemento e igualar con cero:
Si integramos por partes nos lleva a la la siguiente solución:
Aquí ya se empieza a notar la formulación típica del elemento finito.

4251
3
0011 0010 1010 1101 0001 0100 1011
La relación anterior puede ser escrita como:
En mecánica de sólidos a [ k ] le llamamos la matriz de dureza o resistencia (stiffness matrix) y { f } se le llama el vector de cargas (load vector). Se usa la misma terminología en elemento finito. De esta forma tenemos:
[ ]{ } { }k u f=

4251
3
0011 0010 1010 1101 0001 0100 1011
En el sencillo ejemplo considerado para dos elementos de longitud L las matrices de resistencia y vectores de carga pueden ser calculados de manera simple:
La relaciones anteriores proporciononan las ecuaciones de cada elemento. Para obtener la ecuación global del sistema de dos elementos unidos, tendremos el caso de un dominio de dos elementos con 3 nodos (uno es compartido), para lo que necesitamos ensamblar las ecuaciones de los elementos individuales.

4251
3
0011 0010 1010 1101 0001 0100 1011
En nuestro ejemplo el sistema queda de la siguiente forma:
Después de aplicar las condiciones de frontera u(x = 0) = 0 el sistema global de ecuaciones nos queda así:
4251
3
0011 0010 1010 1101 0001 0100 1011
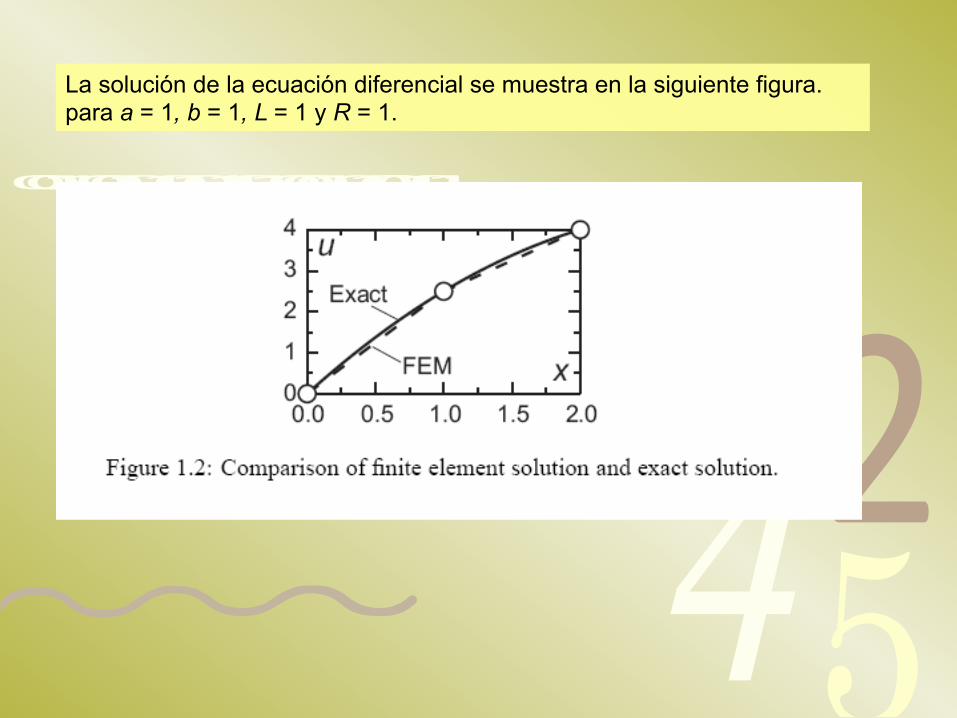
Los valores nodales ui se obtienen como resultado de la solución del sistema lineal de ecuaciones algebraicas. El valor de u para cualquier punto dentro de un elemento puede ser calculado por medio de las funciones de interpolación o de forma. La solución exacta es una función cuadrática. La solución de elemento finito con la ayuda de los elementos más simples es lineal pieza a pieza. Una solución más precisa puede ser obtenida aumentando el número de elementos sencillos o por medio de elementos con funciones de interpolación más complicadas. Para nuestro ejemplo se puede notar que en los nodos el método de elemento finito proporciona los valores exactos de u. Elementos finitos con funciones lineales de interpolación producen valores exactos en los nodos si la solución que se busca es cuadrática. Elementos con funciones de interpolación cuadráticas dan una solución nodal exacta para una solución cúbica, etc.
4251
3
0011 0010 1010 1101 0001 0100 1011
La solución de la ecuación diferencial se muestra en la siguiente figura. para a = 1, b = 1, L = 1 y R = 1.

4251
3
0011 0010 1010 1101 0001 0100 1011
Simulación del Temblor de Kalapana, Hawaii, de 1975 (Ms = 7.2).
EJEMPLOS

4251
3
0011 0010 1010 1101 0001 0100 1011

4251
3
0011 0010 1010 1101 0001 0100 1011
4251
3
0011 0010 1010 1101 0001 0100 1011
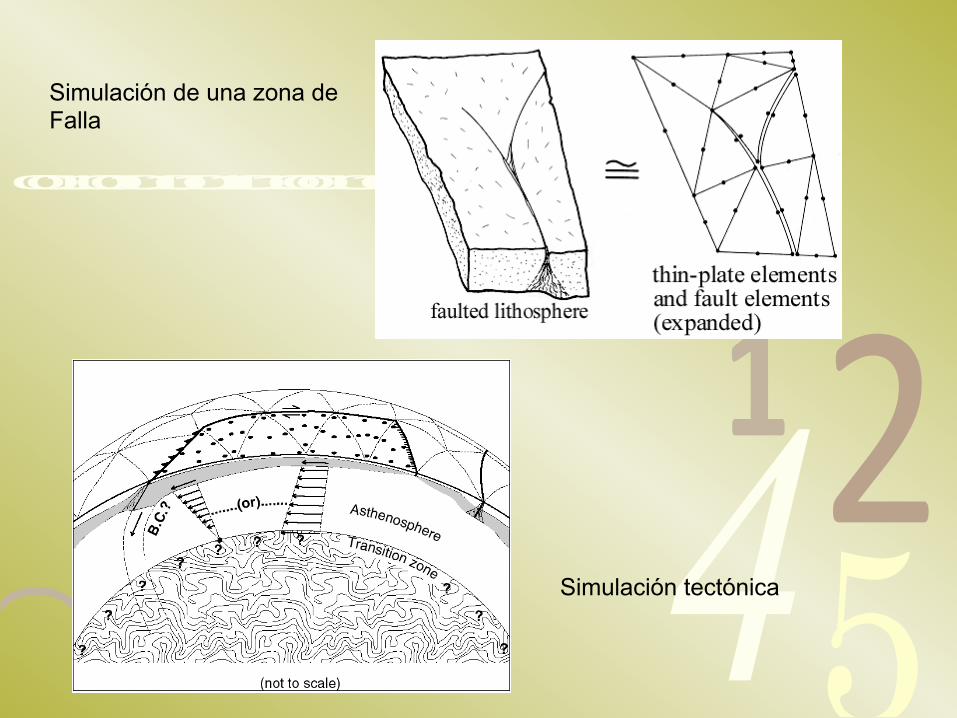
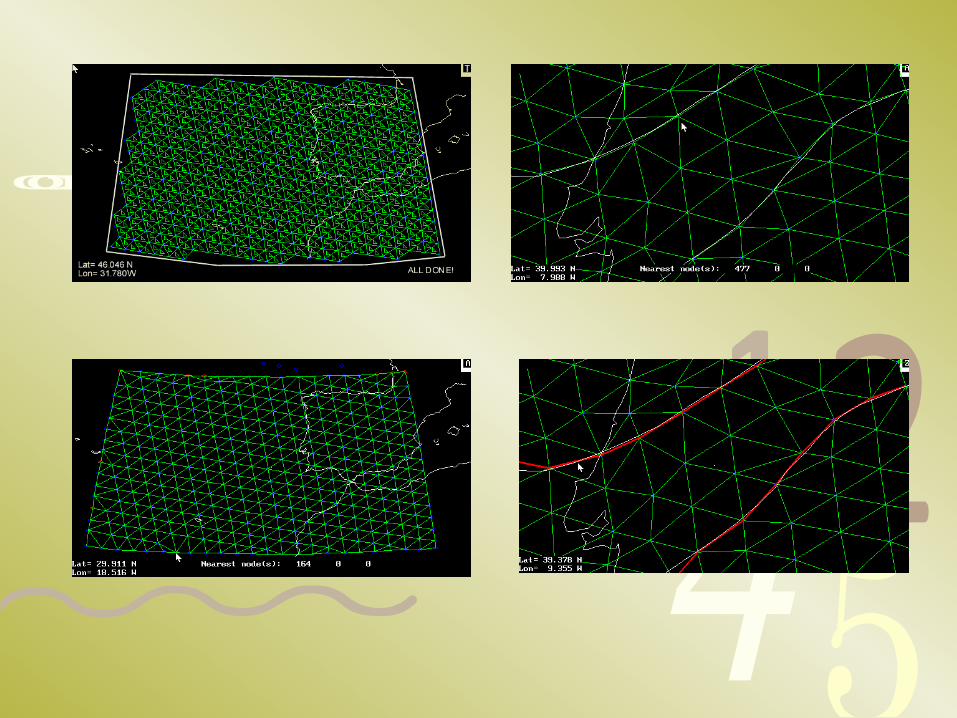
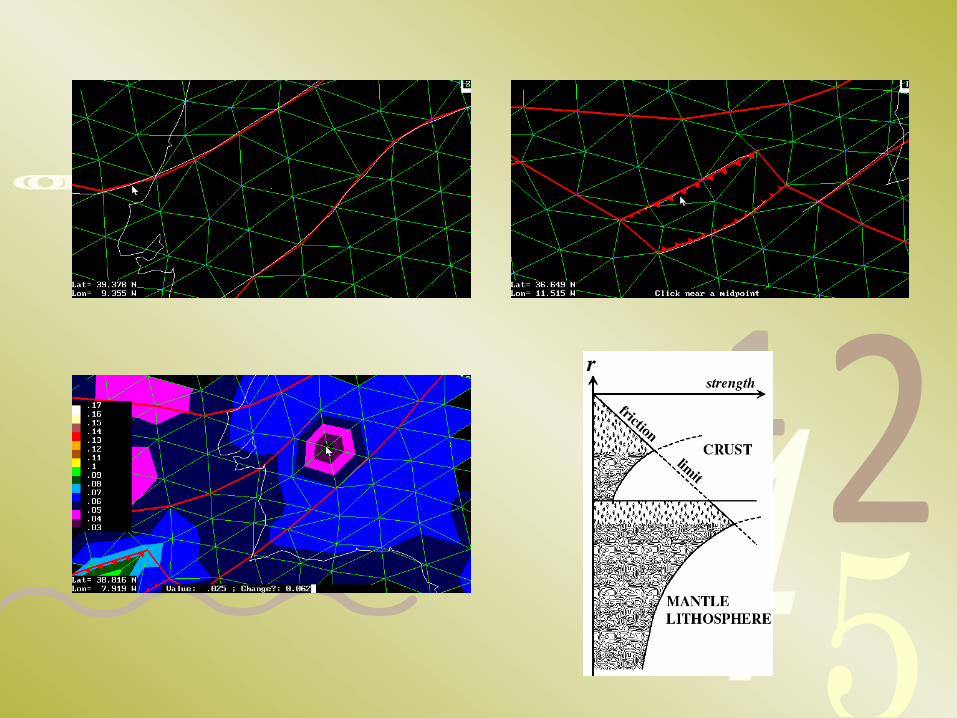
Simulación de una zona de Falla
Simulación tectónica

4251
3
0011 0010 1010 1101 0001 0100 1011
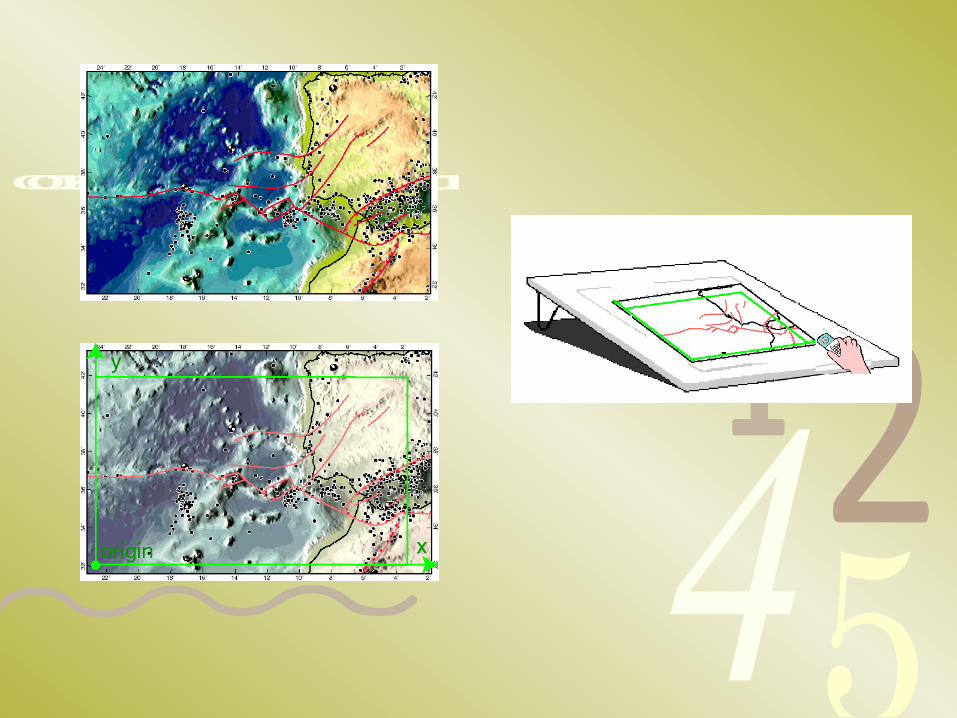
http://element.ess.ucla.edu/guide/home.htm
Programa Shells por Peter Bird
4251
3
0011 0010 1010 1101 0001 0100 1011
4251
3
0011 0010 1010 1101 0001 0100 1011
4251
3
0011 0010 1010 1101 0001 0100 1011
4251
3
0011 0010 1010 1101 0001 0100 1011
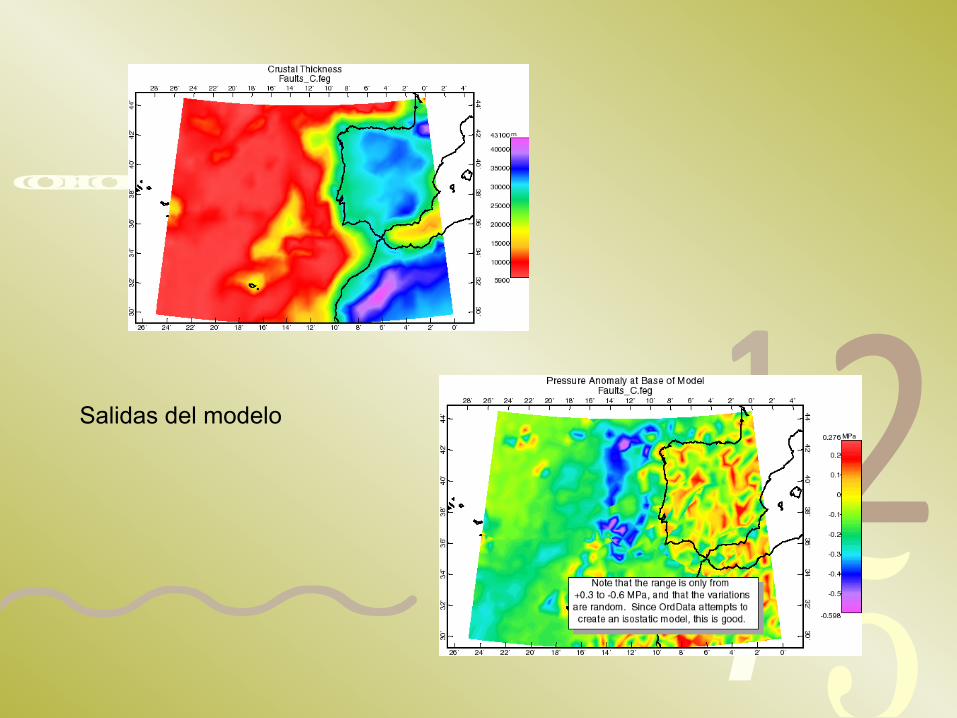
Salidas del modelo

4251
3
0011 0010 1010 1101 0001 0100 1011

4251
3
0011 0010 1010 1101 0001 0100 1011

4251
3
0011 0010 1010 1101 0001 0100 1011
4251
3
0011 0010 1010 1101 0001 0100 1011
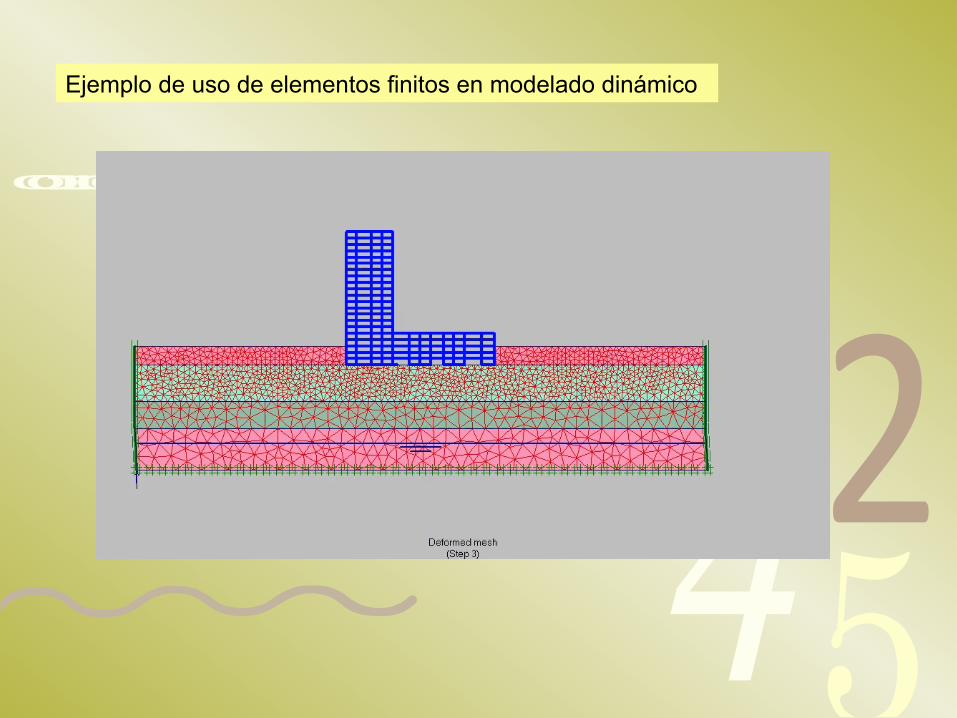
Ejemplo de uso de elementos finitos en modelado dinámico

4251
3
0011 0010 1010 1101 0001 0100 1011
Referencias para programas y ligas interesantes: 1. Programa shells para modelar casos de tectónica con elementos finitos: http://peterbird.name/ (ver la parte donde dice Library of Finite Element Codes) 2. Programa FELIPE (ahora de acceso libre): http://www.felipe.co.uk/ 3. Página “The Finite Element Site” del Prof. Dattaraj Rao: http://dattaraj_rao.tripod.com/FEM/ 4. FreeFem ++ de la Université Pierre et Marie Curie (resuelve ec. diferenc.) http://www.freefem.org/ff++/ 5. Discretizador de elementos del Prof. Nikishkov http://www.u-aizu.ac.jp/~niki/javaappl/jmbr3d/jmbr3d.html 6. Lista de software disponible (libre y de costo) http://en.wikipedia.org/wiki/List_of_finite_element_software_packages