bibing.us.esbibing.us.es/proyectos/abreproy/60087/fichero/identificación+de... · identificación...
TRANSCRIPT

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 1 -
Identificación de UAVs de ala fija y rotatoria
Juan Miguel Barragán Asián e-mail: [email protected]
Proyecto Fin de Carrera
Ingeniería Aeronáutica
Tutor:
Guillermo Heredia Benot
Cotutor:
Aníbal Ollero Baturone
Departamento de Ingeniería de Sistemas y Automática Escuela Técnica Superior de Ingenieros
Universidad de Sevilla Marzo de 2011

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 2 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 3 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 4 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 5 -
ÍNDICE
1. Introducción ------------------------------------------------------------------------- 9
2. Teoría -------------------------------------------------------------------------------- 13
2.1 Tipos de ensayos -------------------------------------------------------- 15
- Ensayos de identificación
- Ensayos de verificación
2.2 Estudio de la compatibilidad cinemática ----------------------------- 17
2.3 SISO ----------------------------------------------------------------------- 21
2.4 MISO y MIMO ---------------------------------------------------------- 26
2.5 Espacio de estado -------------------------------------------------------- 27
2.6 Análisis estadístico ------------------------------------------------------ 30
3. Ensayos de simulación ------------------------------------------------------------ 33
3.1 MEGASTAR XL-120 --------------------------------------------------- 33
3.2 CB-5000 ------------------------------------------------------------------- 45
4. Ensayos en vuelo
4.1 Estudio de la compatibilidad cinemática de los datos de vuelo --- 60
4.2 Identificación del MEGASTAR XL-120 ----------------------------- 62
- Dinámica Longitudinal
- Dinámica Lateral-Direccional
5. Conclusiones y trabajos futuros -------------------------------------------------- 71
Anexo I: Características y datos técnicos ------------------------------------------ 73
MEGASTAR XL-120 Helicóptero CB-5000
Anexo II: Ensayos de simulación Telemetría
MEGASTAR XL-120 ---------------------------------------------- 75 Helicóptero ---------------------------------------------------------- 83 Resultados completos de la identificación del CB-5000 -------------- 91
Anexo III: Telemetría de los ensayos en vuelo ----------------------------------- 99 MEGASTAR XL-120
Bibliografía ---------------------------------------------------------------------------- 111

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 6 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 7 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 8 -
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 9 -
1. Introducción
Un UAV (Unmaned Aereal Vehicle) o vehículo aéreo no tripulado es una aeronave autónoma, es decir, aquella capaz de volar sin asistencia de un piloto.
Este tipo de aeronaves dispone de diferentes sensores (GPS, INS, medidas anemométricas, magnetómetros etc.), de un sistema de control autónomo para poder realizar los vuelos de manera autónoma y de la “carga de pago”, la cual variará en función de la misión.
Un UAV consta de dos segmentos diferenciados:
Segmento de vuelo • Subsistema vehículo Aéreo. Formado a su vez por:
o Subsistema estructura o Subsistema motor o Subsistema de aviónica o "Carga de pago".
• Sistema de recuperación. Tiene como misión la detención segura de la aeronave en tierra o en agua, en el caso de hidroaviones.
Segmento de Tierra
• Subsistema Estación de Control. Generalmente basado en cabinas transportables que alojan en su interior equipos para la comunicación y el procesado de la información recibida de la aeronave
• Subsistema Lanzador. Este subsistema tiene como finalidad el despegue rápido y seguro del UAV. Está formado por una plataforma que acelera el vehículo mediante diferentes técnicas: catapulta, neumática, hidráulica, cohete...
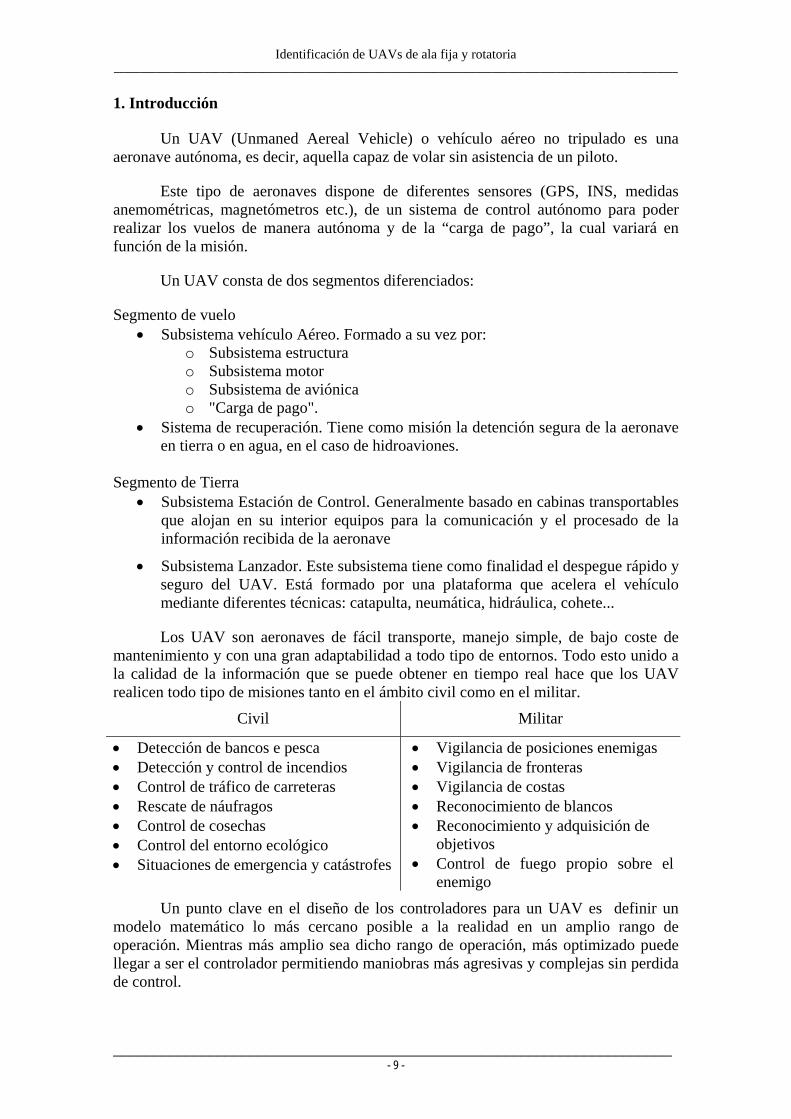
Los UAV son aeronaves de fácil transporte, manejo simple, de bajo coste de mantenimiento y con una gran adaptabilidad a todo tipo de entornos. Todo esto unido a la calidad de la información que se puede obtener en tiempo real hace que los UAV realicen todo tipo de misiones tanto en el ámbito civil como en el militar.
Civil Militar
• Detección de bancos e pesca • Detección y control de incendios • Control de tráfico de carreteras • Rescate de náufragos • Control de cosechas • Control del entorno ecológico • Situaciones de emergencia y catástrofes
• Vigilancia de posiciones enemigas • Vigilancia de fronteras • Vigilancia de costas • Reconocimiento de blancos • Reconocimiento y adquisición de
objetivos • Control de fuego propio sobre el
enemigo
Un punto clave en el diseño de los controladores para un UAV es definir un modelo matemático lo más cercano posible a la realidad en un amplio rango de operación. Mientras más amplio sea dicho rango de operación, más optimizado puede llegar a ser el controlador permitiendo maniobras más agresivas y complejas sin perdida de control.
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 10 -
Para conseguir un modelo preciso se necesitan amplios conocimientos de la dinámica de las aeronaves para poder recoger en el modelo múltiples efectos, como pueden ser la guiñada adversa en un avión o los efectos de acoplamiento rotor-fuselaje en un helicóptero.
Estimaciones teóricas de las derivadas de estabilidad que gobiernan la dinámica de las aeronaves pueden ser obtenidas por diferentes métodos:
• Heurísticos y analíticos. Desarrollado por diferentes autores entre los que destacan Raymer y su libro “Aircraft Design - A Conceptual Approach” y Roskam “Airplane Flight Dynamics and Automatic Flight Controls, Part I and II”
• Correlaciones con otras aeronaves, a través de Software Digital Datcom.
• Dinámica de Fluidos Computacional, conocido por sus siglas en inglés CFD.
Los resultados obtenidos con dichos métodos no dejan de ser meras estimaciones de la realidad y pueden diferir mucho del comportamiento real de la aeronave. Para aumentar la precisión de los modelos se hace necesario incluir datos reales obtenidos del vuelo de la aeronave. Este trabajo trata de estimar los parámetros del modelo dinámico usando un método frecuencial implementado con el programa comercial CIFER Comprehensive Identification from FrEquency Responses.
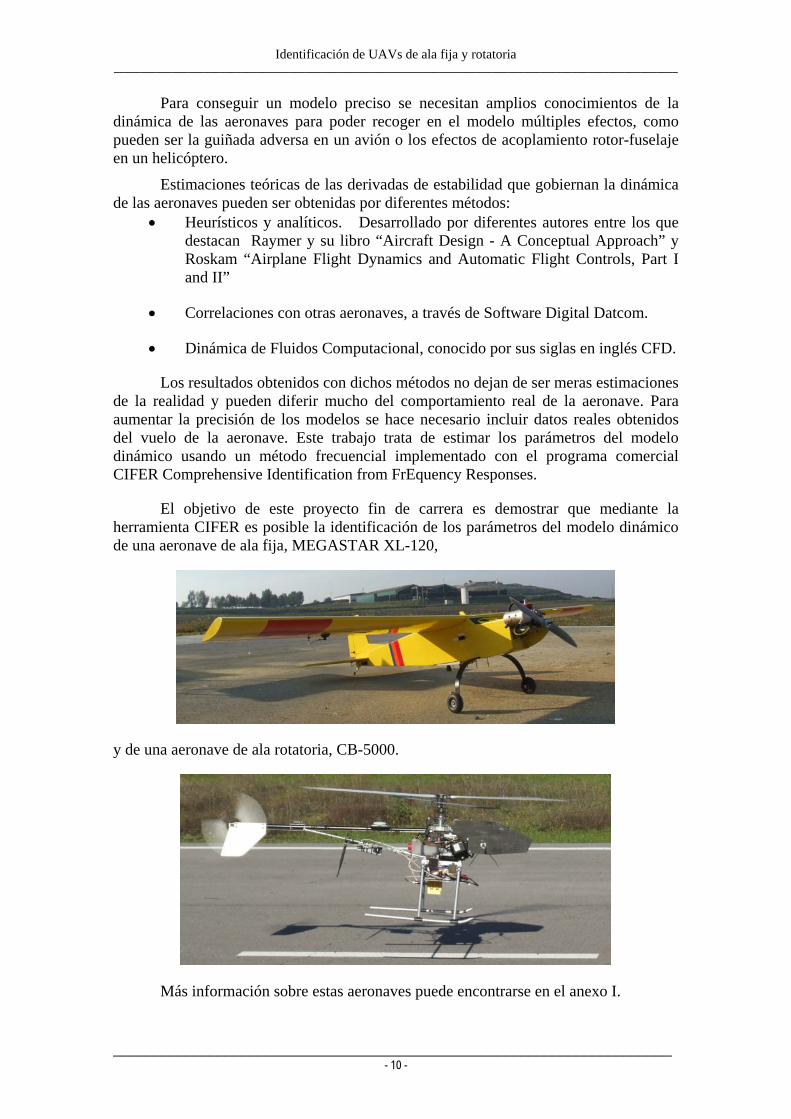
El objetivo de este proyecto fin de carrera es demostrar que mediante la herramienta CIFER es posible la identificación de los parámetros del modelo dinámico de una aeronave de ala fija, MEGASTAR XL-120,
y de una aeronave de ala rotatoria, CB-5000.
Más información sobre estas aeronaves puede encontrarse en el anexo I.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 11 -
Este proyecto está organizado de la siguiente manera:
1) Descripción del método empleado y técnicas de análisis de las estimaciones.
2) Ensayos de simulación para la familiarización con CIFER
3) Experimentación real e identificación
4) Conclusiones y trabajos futuros

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 12 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 13 -
2. Teoría El proceso de identificación de un modelo dinámico puede realizarse desde el
dominio del tiempo o de la frecuencia. Antes de mostrar las características principales de ambos métodos decir que se van a usar conceptos que se definirán en los sucesivos apartados de este proyecto.
Características Método frecuencial Método temporal Método para modelos lineales y no lineales
Válido para ambos modelos. Ídem.
Datos iniciales Respuestas en frecuencias obtenidas a partir de los datos temporales de vuelo.
Datos temporales de vuelo.
¿Cómo se realiza la identificación?
Comparando la respuesta en frecuencia del modelo identificado con la respuesta en frecuencia medida.
Comparando los datos temporales del modelo identificado con los datos temporales medidos.
Inicio del método Cálculo de las respuestas en frecuencia. Obtención de información preliminar sobre la estructura del modelo. Identificación (si se necesita) de un modelo paramétrico más detallado y preciso.
Necesario un modelo paramétrico para la identificación.
Ruido Desviaciones producidas por el ruido en la medición de la respuesta y el ruido de proceso son eliminados del análisis.
Modelos de ruido deben identificarse. Si la presencia del ruido es ignorada, esto introduciría desviaciones en los resultados de la identificación
Medidas independientes proporcionadas
La función de coherencia proporciona una medida directa e independiente de la excitación del sistema, la calidad de los datos y de la linealidad de la respuesta del sistema.
No existe una medida independiente que evalúe la excitación y linealidad del sistema.
Tiempos de retraso Identificación directa y precisa de los tiempos de retraso causados por el cambio de fase lineal con la frecuencia
No identificados directamente.
Desviaciones o cambios de referencia
No son identificados. Deben ser identificados y pueden ser correlacionados con parámetros aerodinámicos.
Eficiencia computacional
Alta eficiencia. Poca eficiencia
Algoritmos o ecuaciones usadas
Algoritmos de identificación muy eficientes. Las respuestas en frecuencia son obtenidas algebraicamente a partir de los parámetros actualizados.
Las ecuaciones del movimiento deben resolverse en cada iteración.
Sistemas inestables Buenos resultados son obtenidos para sistemas inestables
Técnicas especiales para la aplicación a sistemas inestables pueden degradar la calidad de los resultados
Ensayos Barridos en frecuencia. Ensayos de mayor duración que los Multistep
Multistep
Parámetros estimados Estimaciones precisas Estimaciones muy optimistas
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 14 -
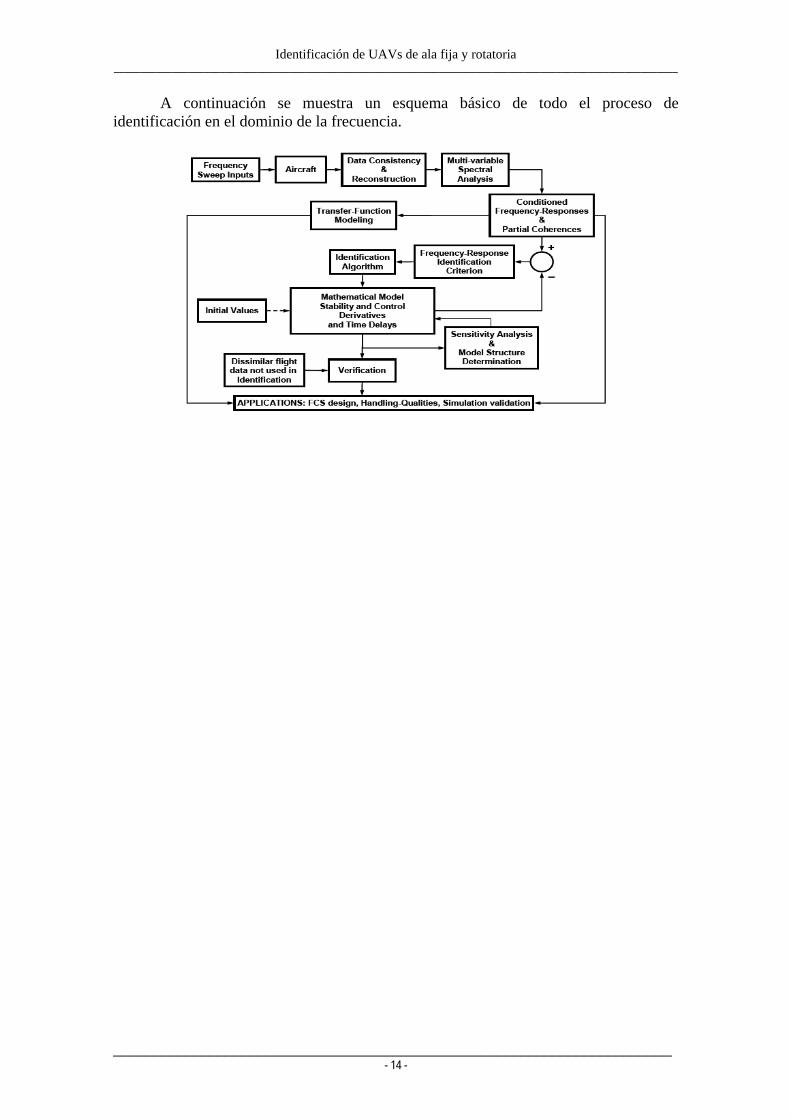
A continuación se muestra un esquema básico de todo el proceso de identificación en el dominio de la frecuencia.
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 15 -
2.1 Tipos de ensayos
- Ensayos de identificación
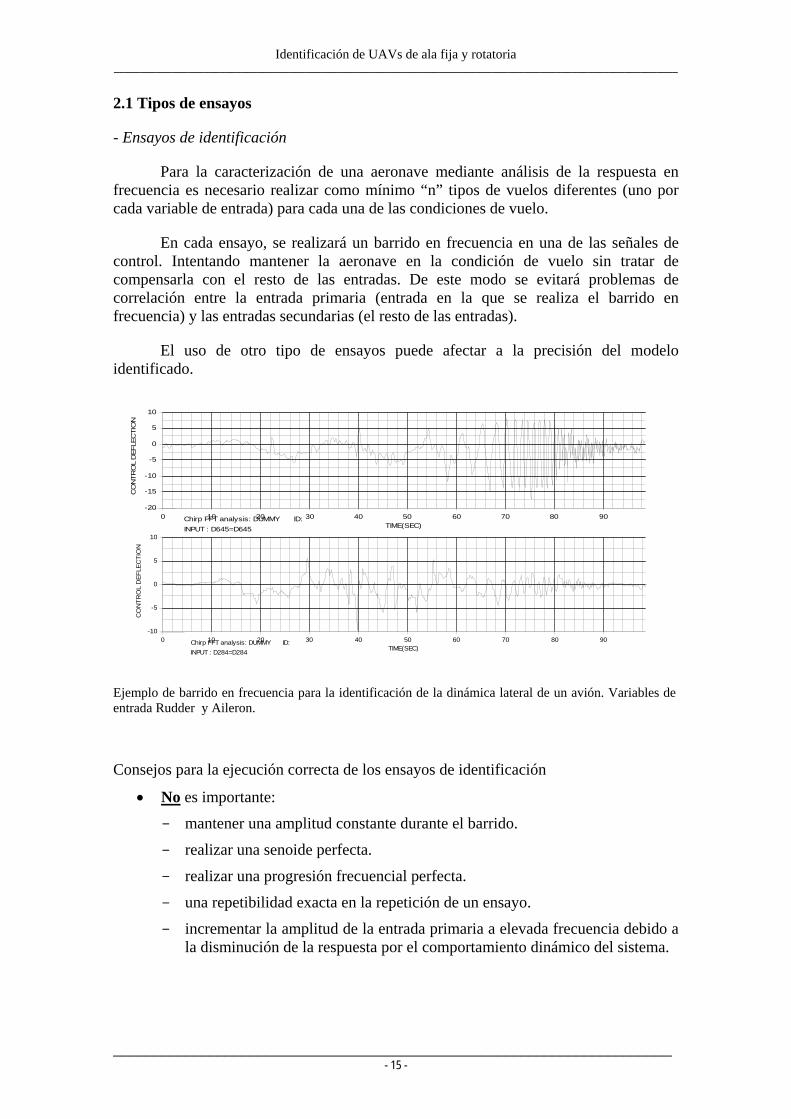
Para la caracterización de una aeronave mediante análisis de la respuesta en frecuencia es necesario realizar como mínimo “n” tipos de vuelos diferentes (uno por cada variable de entrada) para cada una de las condiciones de vuelo.
En cada ensayo, se realizará un barrido en frecuencia en una de las señales de control. Intentando mantener la aeronave en la condición de vuelo sin tratar de compensarla con el resto de las entradas. De este modo se evitará problemas de correlación entre la entrada primaria (entrada en la que se realiza el barrido en frecuencia) y las entradas secundarias (el resto de las entradas).
El uso de otro tipo de ensayos puede afectar a la precisión del modelo identificado.
Ejemplo de barrido en frecuencia para la identificación de la dinámica lateral de un avión. Variables de entrada Rudder y Aileron.
Consejos para la ejecución correcta de los ensayos de identificación
• No es importante:
- mantener una amplitud constante durante el barrido.
- realizar una senoide perfecta.
- realizar una progresión frecuencial perfecta.
- una repetibilidad exacta en la repetición de un ensayo.
- incrementar la amplitud de la entrada primaria a elevada frecuencia debido a la disminución de la respuesta por el comportamiento dinámico del sistema.
Chirp FFT analysis: DUMMY ID: INPUT : D645=D645
0 10 20 30 40 50 60 70 80 90-20
-15
-10
-5
0
5
10
TIME(SEC)
CO
NTR
OL
DEF
LEC
TIO
N
Chirp FFT analysis: DUMMY ID: INPUT : D284=D284
0 10 20 30 40 50 60 70 80 90-10
-5
0
5
10
TIME(SEC)
CO
NTR
OL
DEF
LEC
TIO
N

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 16 -
• Si es importante:
- empezar y terminar el barrido en frecuencia en la posición de trimado y mantenerla durante al menos 3 segundos.
- realizar un barrido en frecuencia completo sin olvidar las frecuencias medias al pasar de baja a alta frecuencia durante la excitación.
- intentar mantenerse en torno a la condición de trimado durante el barrido en frecuencia (actuación sobre la entrada primaria).
- no realizar barridos en frecuencia en las entradas secundarias para mantener la condición de vuelo. Sobre estas entradas se actuará de manera impulsiva cuando sea necesario para mantenerse en la condición de vuelo dentro de unos márgenes razonables. Por ejemplo, en el caso de un helicóptero, durante un barrido en frecuencia en balance (d_lat) se producirán oscilaciones significativas del ángulo de guiñada. Aunque es deseable capturar dicha dinámica, no es deseable grandes movimientos de guiñada. Dicho ángulo se mantendrá dentro de unos márgenes razonables, + 10-20 º actuando sobre el resto de variables de control de manera impulsiva.
- tener sistemas para la visualización en tiempo real de los datos para la correcta realización de las maniobras.
- Ensayos de verificación
Para los ensayos de verificación se usan vuelos diferentes a los de identificación con el objetivo de comprobar la precisión de la identificación realizada. La maniobra comúnmente usada es el “two-side doublet”. Aunque también puede usarse cualquier otro tipo de maniobras, por ejemplo entradas en escalón.
-0.03
-0.02
-0.01
0
0.01
0.02
0.03AIL/uailer

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 17 -
2.2 Estudio de la compatibilidad cinemática
El estudio de la compatibilidad cinemática se realiza para comprobar la consistencia de los datos obtenidos. Verificando que la adquisición de datos se ha realizado de manera adecuada. Con este simple estudio se consigue evitar problemas posteriores en la identificación y en el análisis de los resultados.
Esquema básico seguido para el estudio de la compatibilidad cinemática.
Para una correcta reconstrucción de los datos es fundamental conocer la definición de los sistemas de referencia fijo y móvil, y de cada una de las variables cinemáticas. Teniendo especial atención en la definición de la actitud mediante los ángulos de Euler.
A continuación se presenta la aplicación práctica a la simulación del MEGASTAR XL-120.
Definiciones
- Sistemas de referencia
• Ejes Tierra – fijo
d dt
Velocidad BS du/dtvwdtdua ^/ +=
aceleraciones BS
aceleraciones BS
d dt
Ángulos de Euler
Posición GS Velocidad GS
p q r
Velocidad GS
Velocidad BS
X - Norte
Y - Este
Z - hacia el centro de la Tierra
Datos reconstruidos Datos originales

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 18 -
• Ejes Cuerpo - móvil
O. Origen del sistema de referencia en el centro de gravedad de
la aeronave.
Eje X. Contenido en el plano de simetría de la aeronave y con
sentido hacia el morro de la aeronave.
Eje Y. Dirección perpendicular al plano de simetría y dirección
hacia el semiala derecha.
Eje Z. Completa el triedro.
- Variables cinemáticas en ejes cuerpo y en ejes fijos
• Ejes cuerpo
Velocidades VB = (u,v,w) Velocidades angulares WB = (p,q,r)
• Ejes fijos
Velocidades VG =( NV , EV , DV )
• Actitud. Ángulos de Euler. Eα = (φ ,θ ,ψ )
Eje X
Eje Y
Eje Z
O
Eje Z
Eje X
Eje X
Eje Y
p
r
q
Eje X u Eje Z
Eje Y
w
v
Eje XNV
Eje Z
Eje Y
DV
EV

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 19 -
Reconstrucción
En esta aplicación se partirá desde las velocidades en ejes fijos.
Paso 1) VG VB A partir de la definición de los ángulos de Euler, se puede deducir una
matriz de cambio de base que permite pasar de ejes fijos a ejes cuerpo o, mediante su inversa, de ejes cuerpo a ejes fijos.
)()( cuerpoejesBSRfijosejesA XYZ →−→−→− φθψ
RA
SR
BS
BA CCCC ⋅⋅=
Giro en Z Giro en Y’ Giro en x’’
donde
( ) ( )( ) ( )⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
φφφφ
cossin0sincos0
001BSC ;
( ) ( )
( ) ( ) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
θθ
θθ
cos0sin010
sin0cosSRC ;
( ) ( )( ) ( )
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−=
1000cossin0sincos
ψψψψ
RAC
VB ⋅= BAC VG
Paso 2) Eα WB
- Derivación de los ángulos de Euler
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
==ψθφ
αα
&
&
&
& EE
dtd
- Expresión de las velocidades angulares en ejes cuerpo B
ARB
RSB
SBB
AB //// ωωωω vvvv ++=
donde
S
BSB
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=00/
φω
&v ;
S
BS
BRS C
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡⋅=
0
0
/ θω &v ;
R
SR
BS
BRS CC
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡⋅⋅=ψ
ω&
v 00
/
operando se llega a la siguiente expresión:
( )( ) ( ) ( )( ) ( ) ( ) ⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
ψθφ
φθφφθφ
θω
&
&
&v
coscossin0sincoscos0
sin01
/
rqp
BAB

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 20 -
Paso 3) VB, WB aB aceleraciones en ejes cuerpo
Para reconstruir las aceleraciones se usa la siguiente fórmula:
BBB
B vwdt
dva ^+=
La aceleración calculada es la aceleración inercial. En el caso de que se quiera calcular la aceleración excluyendo el término de la gravedad hay que sumarle adecuadamente el vector gravedad cambiado de signo. Para el caso propuesto en esta aplicación la expresión de la aceleración excluyendo la gravedad quedaría de la siguiente manera:
( )( ) ( )( ) ( )⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅⋅
−⋅−=
θφφθ
θ
coscossincos
singaa BGB
donde 81.9=g m/s2
Comprobación del código
Para la comprobación del código desarrollado se ha procedido a realizar la reconstrucción de un vuelo acrobático en simulación. En las siguientes gráficas se muestra los resultados obtenidos.
0 10 20 30 40 50 60 700
50
100
tiempo [s]
u [m
/s]
Velocidad ejes cuerpo (u,v,w)
0 10 20 30 40 50 60 70-5
0
5
tiempo [s]
v [m
/s]
0 10 20 30 40 50 60 70-5
0
5
tiempo [s]
w [m
/s]
0 10 20 30 40 50 60 70-20
0
20
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
0 10 20 30 40 50 60 70-5
0
5
tiempo [s]
ay [m
/s2 ]
0 10 20 30 40 50 60 70-50
0
50
tiempo [s]
az [m
/s2 ]
--- Datos reconstruidos --- Datos originales
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 21 -
10 20 30 40 50 60
-0.50
0.51
tiempo [s]p
[rad/
s]
Velocidades angulares ejes cuerpo
10 20 30 40 50 60
-101
tiempo [s]
q [ra
d/s]
10 20 30 40 50 60-0.5
00.5
1
tiempo [s]
r [ra
d/s]
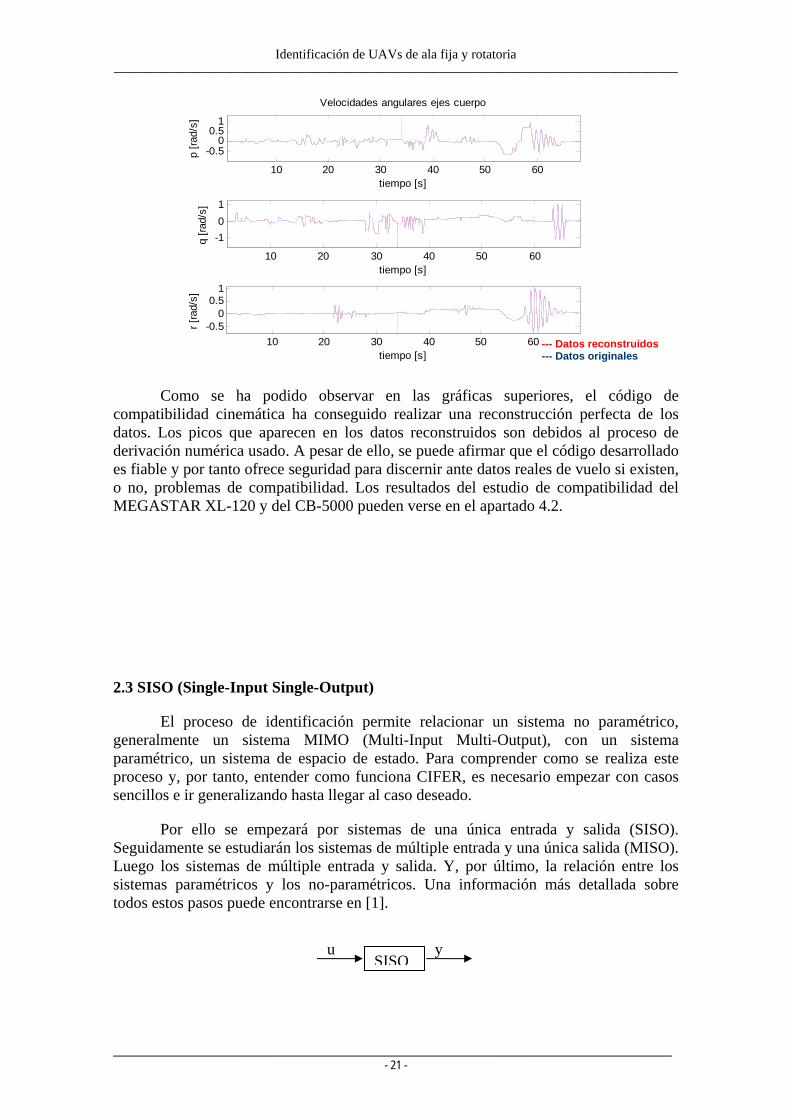
Como se ha podido observar en las gráficas superiores, el código de compatibilidad cinemática ha conseguido realizar una reconstrucción perfecta de los datos. Los picos que aparecen en los datos reconstruidos son debidos al proceso de derivación numérica usado. A pesar de ello, se puede afirmar que el código desarrollado es fiable y por tanto ofrece seguridad para discernir ante datos reales de vuelo si existen, o no, problemas de compatibilidad. Los resultados del estudio de compatibilidad del MEGASTAR XL-120 y del CB-5000 pueden verse en el apartado 4.2.
2.3 SISO (Single-Input Single-Output)
El proceso de identificación permite relacionar un sistema no paramétrico, generalmente un sistema MIMO (Multi-Input Multi-Output), con un sistema paramétrico, un sistema de espacio de estado. Para comprender como se realiza este proceso y, por tanto, entender como funciona CIFER, es necesario empezar con casos sencillos e ir generalizando hasta llegar al caso deseado.
Por ello se empezará por sistemas de una única entrada y salida (SISO). Seguidamente se estudiarán los sistemas de múltiple entrada y una única salida (MISO). Luego los sistemas de múltiple entrada y salida. Y, por último, la relación entre los sistemas paramétricos y los no-paramétricos. Una información más detallada sobre todos estos pasos puede encontrarse en [1].
--- Datos reconstruidos --- Datos originales
SISOu y

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 22 -
- Definición de respuesta en frecuencia
Si a un sistema dinámico simple se le excita con una función sinusoidal, ( ) ( )ftAtx π2sin⋅= , la respuesta del sistema una vez pasado el transitorio del sistema es, ( ) ( )ϕπ +⋅= ftBty 2sin .
Para el caso dado de señales de entrada y salida periódicas, los coeficientes A , B y ϕ pueden ser calculados mediante un desarrollo en serie de Fourier, dejando solo los términos del primer armónico.
La función de respuesta en frecuencia, ( )fH , es una función compleja que se puede definir a su vez por su magnitud, ( )fH , y su ángulo de fase, ∠ ( )fϕ .
( ) ( )( )fAfBfH =
∠ ( )fϕ = ( )fϕ
- Relación entre la transformada de Fourier de la señal temporal y de la respuesta en frecuencia
En este apartado se va a proceder a la generalización de la definición anterior. Se va a resolver el caso en el que la señal de entrada sea arbitraria, no periódica, y, además, se considerará sistemas con una característica dinámica estable o inestable. Esta generalización se lleva a cabo mediante la transformada de Fourier.
( ) ( )∫∞
∞−
⋅−= dtetxfX tfj π2
( ) ( )∫∞
∞−
⋅−= dtetyfY tfj π2
La respuesta en frecuencia está relacionada a través de la transformada de Fourier de las señales temporales mediante la siguiente expresión:
( ) ( ) ( )fXfHfY ⋅=
Expresando ( )fH como número complejo:
( ) ( )( ) ( ) ( )fHjfHfXfYfH IR ⋅+==
( ) ( ) ( )fHfHfH IR22 +=
∠ ( )fϕ = ( ) ( )( )⎥⎦
⎤⎢⎣
⎡= −
fHfH
fR
I1tanϕ

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 23 -
Para poder aplicar las ecuaciones presentadas en este apartado se debe cumplir que las áreas bajo las curvas temporales ( )tx e ( )ty estén acotadas (Condición de Direchlet).
( ) ∞<⋅∫∞
∞−dttx
( ) ∞<⋅∫∞
∞−dtty
Esta condición elimina el ensayo en bucle abierto de sistemas inestables. Una excitación de barrido acotada a un sistema inestable resultará en una respuesta no acotada y, por tanto, no cumpliría con la condición de Direchlet.
Recuérdese del apartado 2.1 la manera correcta de realizar los barridos en frecuencia. 1) Empezar y acabar en trimado y 2) regulación de la aeronave para asegurar que el transitorio esté acotado y es simétrico sobre la condición de vuelo. Este tipo de ensayo cumple directamente con la condición de Direchlet indistintamente de la inherente estabilidad o inestabilidad del sistema bajo estudio.
- Transformada discreta de Fourier y la transformada Chirp-Z
La transformada finita de Fourier, ( )TfX , , de una señal temporal continua con una longitud finita, T , es:
( ) ( )∫ ⋅−=T tfj dtetxTfX0
2, π
En el caso de que la señal temporal sea una secuencia discreta, nX , la relación integral de la transformada de Fourier es aproximada por la transformada discreta de Fourier (DFT):
( ) ( ) ( )⎟⎠⎞
⎜⎝⎛ ⋅−
⋅⋅Δ=Δ⋅= ∑−
= NnkjxtfkXfX
N
nnk
π2exp1
0
para 1...2,1,0 −= Nk
Donde ( )kfX son los coeficientes de Fourier, tΔ es el incremento de tiempo y
N es el número de puntos de frecuencia discreta.
En general, la DFT está sujeta a la restricción de que el número de puntos de la señal temporal, L , y el número de puntos de frecuencia, N , es el mismo por lo que el ancho de la ventana, T , es tL Δ⋅ y el mínimo de resolución en frecuencia, fΔ , es ( )tL Δ⋅1 .
A continuación se define las siguientes funciones espectrales:
( ) ( ) 22~ fXT
fGxx =
( ) ( ) 22~ fYT
fGyy =
( ) ( ) ( ) 2*2~ fYfXT
fGxy ⋅=

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 24 -
donde xxG~ es la densidad de potencia espectral (PSD) de la señal de entrada,
yyG~ es la densidad de potencia espectral de la señal de salida,
xyG~ es la densidad de potencia espectral cruzada y ( )fX e ( )fY son los coeficientes de Fourier de las señales de entrada y salida
respectivamente. El símbolo “A * ” indica el complejo conjugado de A.
La transformada rápida de Fourier (FFT) hace referencia a los algoritmos matemáticos usados para la resolución de la transformada discreta de Fourier. Un algoritmo FFT particularmente flexible está implementado en el software CIFER y es la transformada Chirp-Z (CZT).
La transformada Chirp-Z no está sujeta a la restricción de NL = (sin embargo se debe cumplir la restricción LN ≤ ) lo cual resulta en una resolución en frecuencia, fΔ , más fina para un tamaño de ventana dado. Otra ventaja de la CZT es que el número de puntos temporales, L , puede ser arbitrario. En una FFT estándar L debe ser una potencia entera de 2. Además la CZT reduce los problemas de leakage respecto a algoritmos FFT estándar.
Todas estas características de la CZT proporcionan una excelente flexibilidad en la selección de los tiempos de muestreo, longitud de ventana y resolución en frecuencia. Todo esto mejora la precisión de las respuestas en frecuencia para el análisis de los datos de vuelo de una aeronave.
CIFER además de usar CZT realiza en su programa COMPOSITE una técnica llamada de solapamiento de ventanas con la cual reduce el efecto del leakage mejorando la precisión de los resultados. Tras este proceso, las funciones espectrales anteriormente definidas se denotan como xxG , yyG y xyG .
A partir de las funciones espectrales se puede calcular:
• La respuesta en frecuencia del sistema:
( ) ( )( )fG
fGfH
xx
xy
ˆ
ˆ=
• La función de coherencia: Esta función es un indicador de la linealidad del sistema bajo estudio.
yyxx
xy
xyGG
G
ˆˆ
ˆ 2
2
⋅=γ
Es una función acotada entre 0 y 1 ambos incluidos. Un valor de 1 indica que el sistema es completamente lineal. En la realidad, la coherencia siempre es menor que 1 debido a dos motivos principalmente:
1) No-linealidades en el sistema que la aproximación del primer armónico no puede recoger.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 25 -
2) Contaminación de las señales por ruido. Diferenciando dos tipos de ruidos:
a. Ruidos durante el proceso, tales como una turbulencia, producen una respuesta en el sistema la cual no ha sido generada por las señales de entrada del sistema.
b. Ruido en las medidas. No producen respuesta en el sistema pero contamina la telemetría de los ensayos.
Según indica Tischler en [1], valores de la función de coherencia 6.02 ≥xyγ , aseguran una buena identificación de la respuesta en
frecuencia del sistema.
• Error aleatorio de la estimación de la respuesta en frecuencia: En el punto anterior, se ha mostrado como la función de coherencia
da una información cualitativa sobre la fiabilidad de la respuesta en frecuencia identificada. Con el error aleatorio, es posible cuantificar la fiabilidad de dicha identificación.
[ ]dxy
xyr n
C⋅
−=
2
1 212
γ
γε ε
donde εC es una constante para considerar el solapamiento de las ventanas, winrecd TTn = , donde recT es el tiempo del ensayo y winT es el tiempo de la ventana.
ail_COM_ABCDE_AIL_P
-50
-10
30
MAG
NIT
UDE(
DB)
-500
-300
-100
PHAS
E(DEG
)
0.2
0.6
1
CO
HER
ENC
E
10-1
100
101
102
0
0.5
1
FREQUENCY (RAD/SEC)
ERR
OR
Ejemplo de respuesta en frecuencia, función coherencia y error aleatorio
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 26 -
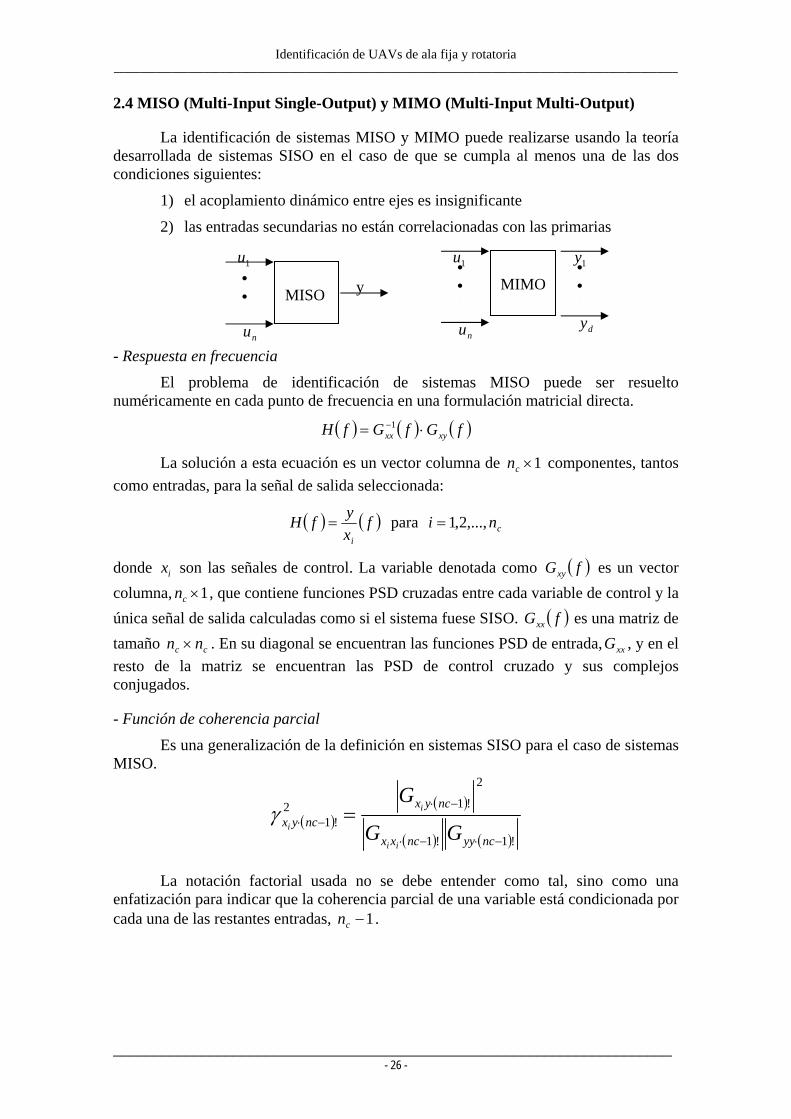
2.4 MISO (Multi-Input Single-Output) y MIMO (Multi-Input Multi-Output)
La identificación de sistemas MISO y MIMO puede realizarse usando la teoría desarrollada de sistemas SISO en el caso de que se cumpla al menos una de las dos condiciones siguientes:
1) el acoplamiento dinámico entre ejes es insignificante
2) las entradas secundarias no están correlacionadas con las primarias
- Respuesta en frecuencia
El problema de identificación de sistemas MISO puede ser resuelto numéricamente en cada punto de frecuencia en una formulación matricial directa.
( ) ( ) ( )fGfGfH xyxx ⋅= −1
La solución a esta ecuación es un vector columna de 1×cn componentes, tantos como entradas, para la señal de salida seleccionada:
( ) ( )fxyfHi
= para cni ,...,2,1=
donde ix son las señales de control. La variable denotada como ( )fGxy es un vector columna, 1×cn , que contiene funciones PSD cruzadas entre cada variable de control y la única señal de salida calculadas como si el sistema fuese SISO. ( )fGxx es una matriz de tamaño cc nn × . En su diagonal se encuentran las funciones PSD de entrada, xxG , y en el resto de la matriz se encuentran las PSD de control cruzado y sus complejos conjugados.
- Función de coherencia parcial
Es una generalización de la definición en sistemas SISO para el caso de sistemas MISO.
( )( )
( ) ( )!1!1
2
!12!1
−⋅−⋅
−⋅−⋅ =
ncyyncxx
ncyxncyx GG
G
ii
i
iγ
La notación factorial usada no se debe entender como tal, sino como una enfatización para indicar que la coherencia parcial de una variable está condicionada por cada una de las restantes entradas, 1−cn .
MISO
1u
y
nu
• •
MIMO
1u
nu
• • •
1y
dy
• • •

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 27 -
- Error aleatorio de la estimación de la respuesta en frecuencia
( )( )[ ]
( ) dncyx
ncyxncr n
Ci
i
⋅
−=
−⋅
−⋅−⋅ 2
1
!1
212!1
!1 γ
γε ε
Una vez resulto el problema de los sistemas MISO, la generalización a sistemas MIMO es fácil. Consiste en repetir el análisis MISO para cada uno de las variables de salida.
Las respuestas en frecuencia del sistema MIMO se recogen en una matriz cT . uTY c ⋅=
2.5 Espacio de estado
Dado un sistema mecánico, las ecuaciones que modelan su comportamiento dinámico pueden escribirse de manera matricial de la siguiente forma:
( )τ−⋅+⋅=⋅ tuGxFxM &
donde en M, F ,G y τ se encuentran los parámetros a identificar. Los efectos no modelados pueden introducirse mediante tiempos de retardos en la matriz τ . Generalmente el vector de estados no es accesible y lo que se mide a través de los sensores es una combinación lineal de las componentes del vector de estados.
xHxHy &⋅+⋅= 10
Las matrices 0H y 1H contienen parámetros conocidos.
Estas ecuaciones del movimiento pueden pasarse a la forma tradicional de espacio de estado:
( )τ−⋅+⋅= tuBxAx&
( )τ−⋅+⋅= tuDxCy donde
FMA ⋅= −1
GMB ⋅= −1
FMHHC 110
−+=
GMHD 11
−=

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 28 -
Mediante la transformada de Laplace, el sistema anterior puede expresarse de la siguiente forma:
( ) ( ) ( )susTsY ⋅= donde
( ) [ ]( )[ ]GMFMsIsHHsT 11110
−−−−+= Ο ( )sτ
donde el símbolo Ο representa la multiplicación elemento a elemento (AΟB = ijij ba ⋅ ) y
Una vez pasado el sistema de espacio de estado a funciones de transferencia, se realiza el ajuste de la matriz ( )sT obtenida del modelo matemático con la matriz cT calculada anteriormente a partir de los datos de vuelo. Este ajuste se realiza resolviendo un problema de minimización en la que la función de coste es:
( ) ( )[ ]∑ ∑= ⎭
⎬⎫
⎩⎨⎧
∠−∠+−=TF nn
l l
cpcg TTWTTWWn
J1
22
1
20 ωω
ωγ
ω
donde magnitud en dB en cada frecuencia ω ,
∠ fase en grados en cada frecuencia ω ,
wn número de puntos de frecuencia,
1ω y wnω frecuencia inicial y final de ajuste,
γW es una función de peso dependiente del valor de la función de coherencia en cada frecuencia ω . La función γW que usa CIFER es
( )[ ]22
158.1 xyeW γγ
−−=
gW y pW son los pesos relativos al error cuadrático de la magnitud y de la fase respectivamente. Los valores usados por convenio [10] son:
0.1=gW
01745.0=pW
( )
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
−−−
−−−
−−−
sss
sss
sss
cnononon
cn
cn
eee
eeeeee
s
τττ
τττ
τττ
τ
...
...
...
...
21
22221
11211

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 29 -
La precisión del modelo identificado está mejor caracterizada por la media de la función de coste:
TFave n
JJ =
La resolución de este problema de minimización se realiza de manera iterativa. CIFER implementa su propio algoritmo de solución para minimizar la función de coste. La solución obtenida es un conjunto de parámetros los cuales son los que mejor aproximan el modelo paramétrico al modelo no-paramétrico.
Tischler asegura en su libro [1] que una función de coste media 100<aveJ suele ser un buen indicativo de que el sistema identificado es bastante preciso. En el caso de las funciones de coste de respuestas en frecuencia secundarias (entiéndase efectos secundarios arH δ ) valores entre 150 y 200 se consideran buenos resultados.
Aunque la función de coste esté dentro de los valores indicados anteriormente, solo se puede afirmar que el sistema identificado es preciso dentro del rango de frecuencias utilizado durante la identificación. Fuera de este rango el modelo no tiene porqué ser preciso. Por ello se realiza una verificación en el tiempo para comprobar que el modelo identificado se aproxima a los datos reales de vuelo. Además, también puede suceder que aún siendo el modelo identificado preciso y las pruebas de verificación sean buenas, el significado físico de los parámetros identificados se haya perdido. Esto puede ser un problema si, por ejemplo, se busca comprobar la validez de un modelo de cálculo aerodinámico. La existencia o no de este problema puede comprobarse mediante técnicas de análisis estadísticos. De todos modos, siempre que sea posible, es recomendable realizar un análisis simple de los signos de las derivadas de estabilidad y control para asegurarse al menos de que los signos de las mismas son correctos.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 30 -
2.6 Análisis estadístico
Una vez realizada la identificación es necesario disponer de alguna herramienta matemática que nos permita:
- Mejorar la estructura del modelo.
- Conocer la precisión de los resultados obtenidos.
Este análisis podría hacerse mediante dos técnicas diferentes:
1) Análisis de dispersión
2) Análisis teórico de la precisión
El primer método no se puede usar por la falta de repeticiones de las diferentes maniobras, lo cual impide tener un resultado estadísticamente significativo.
El segundo método obtiene de manera teórica una estimación de la variabilidad esperada de los parámetros basado en el análisis de sensibilidad de los resultados de la identificación. Teóricamente es el mismo resultado que la desviación estándar que se podría obtener con el primer método. Además, este método proporciona información adicional para refinar el modelo empleado en la identificación.
Parámetros estadísticos
- Inecuación de Cramér-Rao
Esta inecuación establece el límite de Cramér-Rao, iCR , como la desviación estándar mínima esperada iσ del parámetro iθ que podría obtenerse de la repetición de muchas maniobras.
ii CR≥σ
El límite de Cramér-Rao, iCR , para el elemento i, iθ , del conjunto de parámetros identificados 0Θ se determina a partir del elemento diagonal asociado de la inversa de la matriz H .
( )iii HCR 1−=
donde H es una matriz de tamaño pp nn × que se define como:
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=ΘΘ
=∇= Θ
2
2
2
2
1
2
2
2
22
2
12
21
2
21
2
21
2
22
...
...
...
...
npnpnp
np
np
T
JJJ
JJJ
JJJ
JJH
δθδ
δθδθδ
δθδθδ
δθδθδ
δθδ
δθδθδ
δθδθδ
δθδθδ
δθδ
δδδ

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 31 -
El cálculo de esta matriz se realiza numéricamente. Más detalles sobre la resolución numérica puede encontrarse en [1].
Como se ha comentado anteriormente, la inecuación de Cramér-Rao establece que el valor del límite de Cramér-Rao es siempre igual o menor que la desviación estándar que se obtendría de un análisis de dispersión. Por este motivo, muchos autores multiplican el valor del límite de Cramér-Rao por una constante para lograr unas estimaciones razonables de la dispersión esperada. En el programa CIFER esta constante tiene como valor 2.
( ) ( )iiCIFERiii HCRCR 122 −⋅==≈σ
El límite de Cramér-Rao es mejor expresarlo de la siguiente forma:
100i
ii
CRRC
θ= [ ]%
De la experiencia se sabe que un valor del límite de Cramér-Rao por debajo del 20%, %20≤iRC , junto con una función de coste J<100 refleja una alta confianza en la identificación del espacio de estado con una buena precisión predictiva. Alguno de los
iRC pueden superar el valor indicado anteriormente (20% - 40%) sin perdida de confianza o causa de preocupación en los resultados obtenidos.
- Alta insensibilidad Un parámetro se dice que tiene una alta insensibilidad cuando la variación de su valor afecta poco o nada la convergencia de la función de coste J. La insensibilidad, I, se define como:
iii H
I 1=
Este parámetro de insensibilidad se suele expresar de la siguiente forma:
100⋅=i
ii
II
θ[ ]%
Maine and Iliff en [11] demuestran que la insensibilidad es el valor mínimo del limite de Cramér-Rao.
ii RCI ≤
Recordando la constante introducida en el límite de Cramér-Rao para obtener resultados más razonables, la relación anterior se convierte en:
ii RCI *5.0≤
De la experiencia se puede obtener una cota de la insensibilidad, %10≤I , siendo este valor consistente con el del límite de Cramér-Rao. Al igual que con el límite de Cramér-Rao, pueden haber valores que sobrepasen esta cota dentro de un rango del 10% al 20 % sin perdida de confianza en la precisión de los resultados.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 32 -
- Alta correlación
Ocurre cuando dos o más parámetros pueden ser simultáneamente variados en una relación lineal y tener un efecto compensado en la función de coste.
Para el caso de sistemas MIMO se recurre al elipsoide de confianza escalado, el cual se define como:
iCRi CR
iH )(:,11 −−Γ=Θ
donde )(:,1 iH − denota la i-ésima columa de la matriz 1−H y Γ es una matriz diagonal en la que sus elementos son las insensibilidades de los distintos parámetros identificados.
Los elementos de este elipsoide están normalizados.
Cuando el RC de un parámetro excede considerablemente el 20% y la insensibilidad asociada se mantiene dentro del intervalo I<=10%, esto es indicativo de una correlación de parámetros. Las componentes con valores más altos en el elipsoide normalizado, CRiΘ , reflejan las contribuciones de los parámetros correlacionados que son responsables del alto RC .

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 33 -
3. Ensayos de simulación
La simulación de los ensayos nos permite:
- un entorno controlado donde poder realizar multitud de ensayos.
- la posibilidad de observar en tiempo real gran cantidad de telemetría durante los ensayos.
- familiarizarse con el entorno CIFER.
- encontrar una solución a la problemática de los UAVs pilotados visualmente en modo manual en las pruebas de vuelo de avance. Dicha problemática consiste en que para una identificación precisa se requiriere que cada uno de los ensayos tenga una duración considerable, unos 90s aproximadamente. Debido a las velocidades de avance de estas aeronaves, éstas se desplazan en dicho tiempo sobre unos 3 km. Pudiéndose salir del campo visual con el consiguiente peligro que ello conlleva.
- evitar el derroche de recursos humanos, de materiales y de tiempo en una campaña de ensayos sin experiencia alguna en los mismos.
3.1 MEGASTAR XL-120
- Modelo La simulación del MEGASTAR XL-120 se ha realizado usando la toolbox
Aerosim de Matlab-Simulink. Los datos necesarios para la caracterización del modelo se han tomado del trabajo fin de carrera “Modelado y análisis de las derivadas de estabilidad de un avión de ala fija” de Daniel Santamaría Rubio.
Una vez creado el modelo, la toolbox Aerosim permite obtener el modelo linealizado de la dinámica longitudinal y lateral-direccional en un punto de trimado. A continuación se muestran los resultados obtenidos al emplear dicha herramienta.
Condiciones de vuelo
Vairspeed [m/s] 25 Masa de combustible [kg] 0.68
Altitud [m] 100 Ángulo de balance [rad] 0
Resultados del trimado
Entradas
Elevador [rad] -0.0447 Timón vertical [rad] 0.0025
Alerón [rad] -0.0023 Palanca de gases [%] 41
Vector de estado
u [m/s] 24.98 p [deg/s] 0
v [m/s] 0.01 q [deg/s] 0
w [m/s] 1.1 r [deg/s] 0
phi [deg] -0.2 h [m] 100
theta [deg] 2.53 Masa de combustible [kg] 0.68
psi [deg] 0.30 Motor [rpm] 4923
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
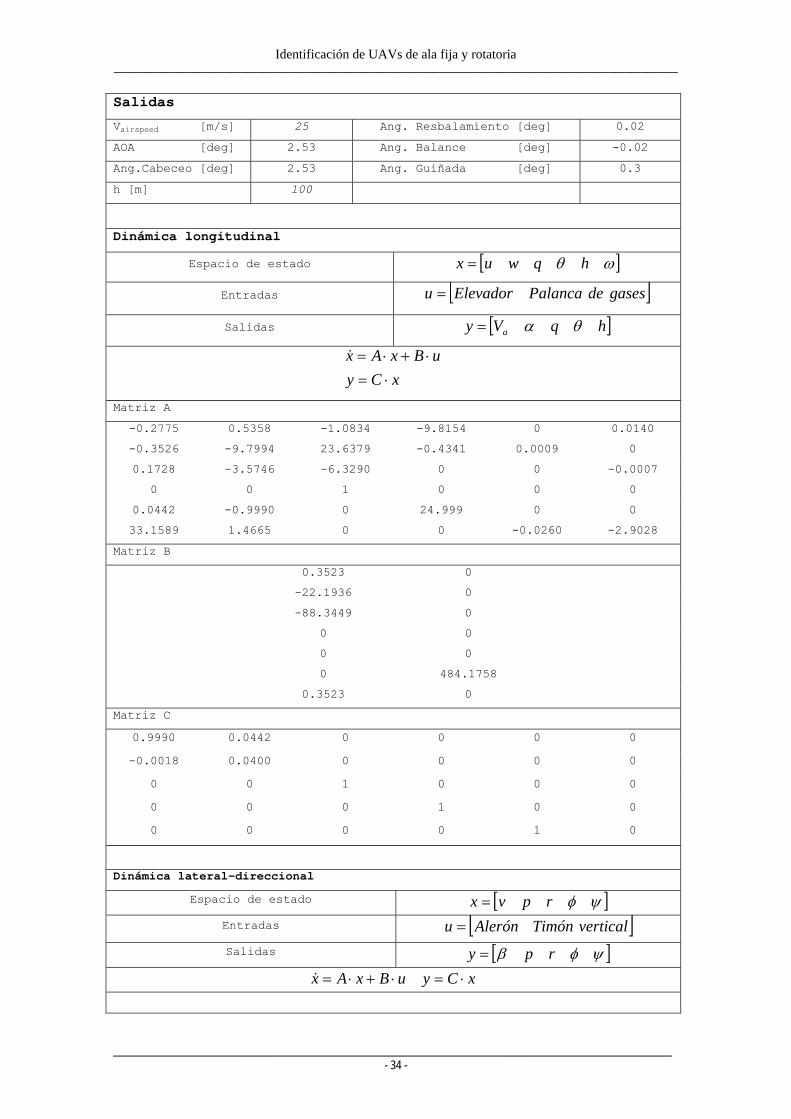
______________________________________________________________________ - 34 -
Salidas
Vairspeed [m/s] 25 Ang. Resbalamiento [deg] 0.02
AOA [deg] 2.53 Ang. Balance [deg] -0.02
Ang.Cabeceo [deg] 2.53 Ang. Guiñada [deg] 0.3
h [m] 100
Dinámica longitudinal
Espacio de estado [ ]ωθ hqwux =
Entradas [ ]gasesdePalancaElevadoru =
Salidas [ ]hqVy a θα=
xCyuBxAx
⋅=⋅+⋅=&
Matriz A
-0.2775 0.5358 -1.0834 -9.8154 0 0.0140
-0.3526 -9.7994 23.6379 -0.4341 0.0009 0
0.1728 -3.5746 -6.3290 0 0 -0.0007
0 0 1 0 0 0
0.0442 -0.9990 0 24.999 0 0
33.1589 1.4665 0 0 -0.0260 -2.9028
Matriz B
0.3523 0
-22.1936 0
-88.3449 0
0 0
0 0
0 484.1758
0.3523 0
Matriz C
0.9990 0.0442 0 0 0 0
-0.0018 0.0400 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
0 0 0 0 1 0
Dinámica lateral-direccional
Espacio de estado [ ]ψφrpvx =
Entradas [ ]verticalTimónAlerónu =
Salidas [ ]ψφβ rpy =
xCyuBxAx ⋅=⋅+⋅=&

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 35 -
Matriz A
-0.5705 1.0318 -24.6079 9.8154 0
-1.3569 -6.5537 1.5883 0 0
1.3606 -0.1903 -1.7236 0 0
0 1 0.0442 0 0
0 0 1.0010 0 0
Matriz B
0 3.4203
-140.1446 2.1037
-7.3634 -11.6396
0 0
0 0
Matriz C
0.0400 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 1
- Esquema de la simulación
Controls
Visualización Inputs/ControlState
VelWEuler
Visualización Datos
STOP
Stop Simulationwhen A/C on the ground
Controls
Winds
RST
States
Sensors
VelW
Mach
Ang Acc
Euler
AeroCoef f
PropCoef f
EngCoef f
Mass
ECEF
MSL
AGL
REarth
AConGnd
Megastar XL-120
Controls
Winds
RST
Inputs DanivionTrim - Gamepad Thrustmaster
- Baja Sensibil idad
Sensor ( Ground Speed)
Euler (Phi Theta Psi) [rad]
FlightGear Animation
StatesVelW
Euler
CIFER Y_Data
Controls
CIFER U_Data
- Realización de los ensayos
Para una adecuada realización de los ensayos se ha recurrido al simulador de vuelo FlightGear para visualizar en tiempo real los datos del modelo en Simulink. Además para una buena ejecución de las maniobras se ha contado con un gamepad con 5 canales analógicos y sus correspondientes palancas de trimado. A parte de esto, se ha creado en simulink un bloque que realiza los barridos en frecuencia en las distintas

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 36 -
señales de control. Las salidas de dicho bloque se suman a las del gamepad. Con ello, el piloto solo tiene que preocuparse de mantener la aeronave cerca de las condiciones de trimado en el caso de que ésta se desviase de dichas referencias durante el transcurso de las maniobras de identificación.
TRIMADO
1Controls
t
tini
tout
f ini
f out
ctrl
f
ele
ail
rud
thr
fcn
barridos en frecuencia
-C-
Throttle
Scope
-C-
Rudder
Elev ator
Ailerons
Rudder
Throttle
Mando USB
-C-
Elevator
Clock
-C-
Aileron
1
6
4
5
1e-3
4
160
3
10
2
Para resolver el problema del alcance visual comentado anteriormente, se han realizado diferentes tipos de ensayos hasta encontrar con uno que garantice unos ensayos seguros y una buena identificación. La solución encontrada ha sido realizar los ensayos por etapas. En cada etapa se excita a la aeronave en un determinado rango de frecuencias. Con ello se consigue tener todo la información dinámica de la aeronave.
20 40 60 80 100 120 140-0.055
-0.05
-0.045
-0.04
-0.035

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 37 -
- Proceso de identificación de la Dinámica lateral-direccional
Los ensayos para la identificación y verificación de la dinámica lateral-direccional del MEGASTAR XL-120 se realizaron en modo manual sin el uso del bloque de barrido. La frecuencia de muestreo de los sensores durante la realización de los ensayos fue de 125 Hz, más que suficiente para captar con precisión los modos lentos y rápidos de la aeronave.
Véase en el anexo II la telemetría de los ensayos de simulación del MEGASTAR.
El filtrado de los datos para eliminar información no recogida por el modelo es, en este caso, indiferente ya que el modelo de AeroSim no recoge efectos aeroelásticos y/o de resonancia de la estructura que puedan modificar los valores de los parámetros a identificar. A pesar de ello hubo que realizarlo ya que CIFER no permitía continuar sin realizar esta operación (-3db @ 4Hz). A parte del filtrado, se realizó una interpolación de los datos para pasarlos a una frecuencia de muestreo de 25 Hz. Esta operación se realizó para aligerar el cálculo numérico del ordenador. Dicha frecuencia de muestreo, aún siendo inferior al de los datos de vuelo, es suficiente para captar los modos propios de la aeronave.
Los parámetros de las ventanas fueron elegidos con valores parecidos a los presentados en el ejemplo de la identificación de la dinámica lateral-direccional del XV-15 que viene junto con CIFER.
Procesando los datos mediante CIFER se han obtenido las respuestas en frecuencia de la aeronave. Dichas respuestas pueden verse en el apartado de verificación en frecuencia junto con las respuestas en frecuencia del modelo identificado.
La elección del rango de frecuencias necesario para la identificación, se ha realizado teniendo en cuanta el valor de la función de coherencia y la amplitud de dicho rango para cada una de las respuestas en frecuencia. Dichos valores se encuentran en la tabla siguiente:
Alerón Timón vertical
p 0.31-31 0.31-31
r 0.31-19 1.60-31
φ 0.31-19 0.31-10
ay 0.31-19 0.31-31
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
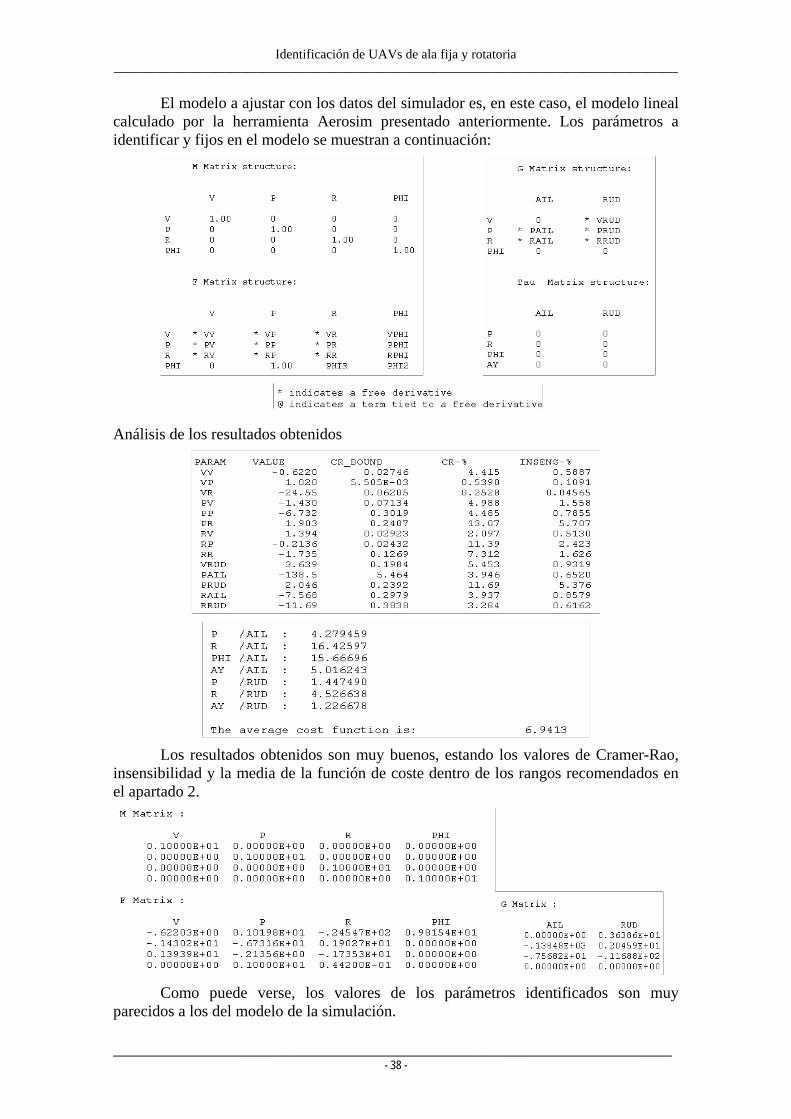
______________________________________________________________________ - 38 -
El modelo a ajustar con los datos del simulador es, en este caso, el modelo lineal calculado por la herramienta Aerosim presentado anteriormente. Los parámetros a identificar y fijos en el modelo se muestran a continuación:
Análisis de los resultados obtenidos
Los resultados obtenidos son muy buenos, estando los valores de Cramer-Rao,
insensibilidad y la media de la función de coste dentro de los rangos recomendados en el apartado 2.
Como puede verse, los valores de los parámetros identificados son muy parecidos a los del modelo de la simulación.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 39 -
Verificación en el dominio de la frecuencia
Flight resultsDINLAT2 Id:ensayo largo identif i solo con datos disponibles
-20
0
20
40
60P /AIL
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
10-1
100
101
102
-400
-350
-300
-250
-200
-150
-100P /AIL
Frequency (Rad/Sec)
Phas
e (D
eg)
-40
-20
0
20
40R /AIL
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
10-1
100
101
102
-750
-650
-550
-450
-350
-250
-150R /AIL
Frequency (Rad/Sec)
Phas
e (D
eg)
-20
0
20
40
60PHI /AIL
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
10-1
100
101
102
-500
-450
-400
-350
-300
-250
-200PHI /AIL
Frequency (Rad/Sec)
Phas
e (D
eg)
Flight resultsDINLAT2 Id:ensayo largo identif i solo con datos disponibles
-40
-20
0
20
40AY /AIL
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
10-1
100
101
102
-550
-450
-350
-250
-150
-50
50AY /AIL
Frequency (Rad/Sec)
Phas
e (D
eg)
-40
-20
0
20
40P /RUD
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
10-1
100
101
102
-500
-450
-400
-350
-300
-250
-200
-150P /RUD
Frequency (Rad/Sec)
Phas
e (D
eg)
-40
-20
0
20
40R /RUD
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
100
101
102
-400
-350
-300
-250
-200
-150
-100R /RUD
Frequency (Rad/Sec)
Phas
e (D
eg)
Flight resultsDINLAT2 Id:ensayo largo identif i solo con datos disponibles
q y ( )
10-1
100
101
102
-450
-400
-350
-300
-250
-200
-150AY /RUD
Frequency (Rad/Sec)
Phas
e (D
eg)
-40
-20
0
20
40AY /RUD
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
AY /RUD

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 40 -
Verificación en dominio del tiempo
Entradas
Flight data0 0.976 1.952 2.928 3.904 4.88 5.856 6.832 7.808 8.784 9.76
-0.03
-0.02
-0.01
0
0.01
0.02
0.03AIL/uailer
Time (Sec)
Con
trol D
efle
ctio
n
0 0.976 1.952 2.928 3.904 4.88 5.856 6.832 7.808 8.784 9.76-0.2
-0.1
0
0.1
0.2RUD/urudder
Time (Sec)
Con
trol D
efle
ctio
n
Salidas
Flight dataDINLAT2 Id:sin etapas solo con datos disponibles
-0.4
-0.2
0
0.2
0.4
0.6P/yp
Res
pons
e
0 0.95 1.9 2.85 3.8 4.75 5.7 6.65 7.6 8.55 9.5-0.6
-0.4
-0.2
0
0.2
0.4R/yr
Time (Sec)
Res
pons
e
-0.3
-0.2
-0.1
0
0.1
0.2PHI/yphi
Res
pons
e
0 0.95 1.9 2.85 3.8 4.75 5.7 6.65 7.6 8.55 9.5-1.5
-1
-0.5
0
0.5
1AY/yAy
Time (Sec)
Res
pons
e
- Proceso de identificación de la Dinámica longitudinal Los ensayos para la identificación y verificación de la dinámica longitudinal del
MEGASTAR XL-120 se realizaron en modo manual con la ayuda del bloque de barrido. Dicho bloque fue necesario introducirlo para estos ensayos debido a la dificultad de realizar una buena ejecución de los mismos. A frecuencias bajas se producía el acoplamiento con el modo lento de la aeronave haciéndose muy complicado mantener la aeronave dentro de las condiciones de referencia. La frecuencia de muestreo de los sensores fue de 125 Hz.
Véase en el anexo II la telemetría de los ensayos de simulación del MEGASTAR.
Para el proceso de identificación, los datos de vuelo fueron filtrados (-3db @ 4Hz) y, también, se les cambió la frecuencia de muestreo a 25 Hz.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 41 -
Los parámetros de las ventanas fueron elegidos de la siguiente manera. El valor para la ventana más pequeña es el mínimo que permitía el programa según el filtrado y el nuevo tiempo de muestreo. El valor para la ventana más grande es aproximadamente el valor del tiempo característico del modo lento longitudinal. El resto de ventanas se intercalaron entre estas dos. El ajuste de los distintos parámetros para las ventanas se obtuvo con la función de autoajuste que incorpora CIFER.
Procesando los datos mediante CIFER se ha obtenido las respuestas en frecuencia de la aeronave. Dichas respuestas pueden verse en el apartado de verificación en frecuencia junto con las respuestas en frecuencia del modelo identificado.
El rango de frecuencia elegido en cada una de las respuestas en frecuencias para el proceso de identificación se muestra en la tabla siguiente.
Rango de frecuencias [Hz]
w 0.63 - 31.4
q 0.63 - 31.4
aX 2.50 - 31.4
aZ 0.80 - 31.4
θ 1.50 - 20
El modelo a ajustar con los datos del simulador es, en este caso, el modelo lineal calculado por la herramienta Aerosim presentado anteriormente. Los parámetros a identificar y fijos en el modelo se muestran a continuación:

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 42 -
Análisis de los resultados obtenidos
A diferencia de la dinámica lateral-direccional, los ensayos de identificación de
la dinámica longitudinal son mucho más complicados. Sobre todo a baja frecuencia debido al acoplamiento con el modo lento comentado anteriormente. Todo esto se refleja en los datos estadísticos que muestran posibles correlaciones entre algunas de las variables, insensibilidad y valores de RC por encima de lo recomendado. A pesar de ello, como se ha comentado en el apartado 2.6, Tischler asegura en su libro [1] que la existencia de algunas variables con valores algo por encima de los recomendados no tiene porqué ser causa de preocupación o motivo de desconfianza en el modelo identificado.
Como excepción, la variable UELE con un valor identificado de 0.2802 (valor real 0.3523), con un valor de RC del 88% e insensibilidad del 27%. En este caso al ser una simulación y conocer el modelo perfectamente puede comprobarse que el error relativo entre el valor real y el estimado en la identificación es del 20.5%. Un valor aceptable, como puede verse más adelante en los apartados de verificación, debido a los buenos resultados obtenidos en dichas pruebas. A pesar de ello, esta metodología solo es aplicable en este caso en el cual se sabe con seguridad cual es el modelo, ya que estamos en una simulación. Si estos mismos resultados se hubiesen obtenido de un vuelo real, lo único que se podría concluir a la vista de los pruebas de verificación, es que el modelo identificado es preciso con los datos pero algunas de las derivadas identificadas no tienen porqué tener significado físico.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 43 -
Para mejorar la precisión del modelo identificado sería necesario realizar unos ensayos mejores, los cuales no se han realizado por no disponer de la habilidad suficiente.
A continuación se muestran las matrices del modelo identificado las cuales son prácticamente idénticas a las del modelo de la simulación.
Verificación en el dominio de la frecuencia
Flight resultsDINLON91 Id:BARRIDO EN ETAPAS 7 ETAPAS SOLO ELE
-20
0
20
40
60W /ELE ELE11_COM_ABCDE_ELE_W
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-450
-400
-350
-300
-250
-200-150
W /ELE ELE11_COM_ABCDE_ELE_W
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1W /ELE ELE11_COM_ABCDE_ELE_W
Frequency (Rad/Sec)
Coh
eren
ce
-40
-20
0
20
40Q /ELE ELE11_COM_ABCDE_ELE_Q
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-400
-350
-300
-250
-200
-150-100
Q /ELE ELE11_COM_ABCDE_ELE_Q
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1Q /ELE ELE11_COM_ABCDE_ELE_Q
Frequency (Rad/Sec)
Coh
eren
ce
-40
-20
0
20
40AX /ELE ELE11_COM_ABCDE_ELE_AX
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-400
-350
-300
-250
-200
-150-100
AX /ELE ELE11_COM_ABCDE_ELE_AX
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1AX /ELE ELE11_COM_ABCDE_ELE_AX
Frequency (Rad/Sec)
Coh
eren
ce

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 44 -
Flight resultsDINLON91 Id:BARRIDO EN ETAPAS 7 ETAPAS SOLO ELE
-20
0
20
40
60AZ /ELE ELE11_COM_ABCDE_ELE_AZ
Frequency (Rad/Sec)M
agni
tude
(DB)
-250
-200
-150
-100
-50
0
50AZ /ELE ELE11_COM_ABCDE_ELE_AZ
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1AZ /ELE ELE11_COM_ABCDE_ELE_AZ
Frequency (Rad/Sec)
Coh
eren
ce-40
-20
0
20
40TETA/ELE ELE11_COM_ABCDE_ELE_TETA
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-500
-450
-400
-350
-300
-250
-200TETA/ELE ELE11_COM_ABCDE_ELE_TETA
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1TETA/ELE ELE11_COM_ABCDE_ELE_TETA
Frequency (Rad/Sec)
Coh
eren
ce
Verificación en el dominio del tiempo
-14
-12
-10
-8
-6
-4
-2AZ/yAz
p
10 10.8 11.6 12.4 13.2 14 14.8 15.6 16.4 17.2 18-0.15
-0.1
-0.05
0
0.05
0.1
0.15TETA/ytheta
Flight dataDINLON91 Id:ENSA AUT 7 ETAPAS SOLO ELE
23.5
24
24.5
25
25.5
26
26.5U/yVu
Res
pons
e
10 10.8 11.6 12.4 13.2 14 14.8 15.6 16.4 17.2 180.20.40.60.8
11.21.41.6
W/yVw
Time (Sec)
Res
pons
e
-0.3
-0.2
-0.1
0
0.1
0.2Q/yq
Res
pons
e
10 10.8 11.6 12.4 13.2 14 14.8 15.6 16.4 17.2 180
0.2
0.4
0.6
0.8AX/yAx
Time (Sec)
Res
pons
e
10 10.8 11.6 12.4 13.2 14 14.8 15.6 16.4 17.2 18-0.08
-0.06
-0.04
-0.02
0
0.02ELE/yelev
Time (Sec)
Con
trol D
efle
ctio
n

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 45 -
Por último, comentar que la solución encontrada al problema del alcance visual realizando los ensayos por etapas, ofrece unos resultados similares a los que se obtienen tras procesar los datos de un vuelo ininterrumpido de igual tiempo de ensayo. Por ello, se puede dar por buena la solución en un entorno de simulación, a la espera de corroborarla con los ensayos reales.
3.2 CB-5000
- Modelo El modelo de helicóptero usado es el modelo diseñado por Luis Sandino. Dicho modelo es un modelo válido para el desarrollo de controladores, el cual recoge la dinámica característica de los helicópteros pequeños. Más información sobre dicho modelo puede encontrarse en el proyecto fin de máster de Luis Sandino “Modelado, Identificación y Control de un Helicóptero Autónomo”.
Usando alguna de las herramientas creadas por Luis Sandino se pudo obtener un modelo linealizado en un punto de operación. Dicho punto de operación fue un vuelo a punto fijo con un rumbo de 0 grados.
Antes de presentar el modelo linealizado es conveniente aclarar la notación usada.
• q1 q2 q3: Vector posición ejes fijos
• q4 q5 q6: Ángulos de Euler, secuencia 1-2-3
• u1 u2 u3: Vector velocidad en ejes fijos
• u4 u5 u6: Vector velocidad angular en ejes cuerpo
• pc colectivo del rotor principal
• py movimiento del plato cíclico para obtener un desplazamiento lateral
• px movimiento del plato cíclico para obtener un desplazamiento longitudinal
• pt colectivo del rotor de cola

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 46 -
Dinámica del helicóptero
Espacio de estado [ ]654321654321 uuuuuuqqqqqqx =
Entradas [ ]ptpypxpcu =
uBxAx ⋅+⋅=&
Matriz A
0 0 0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 0 0 1
0 0 0 0 9.8064 ─0.26 0 0 0 0 0 0
0 0 0 ─9.81 0 0 ─0.00 0.0681 ─0.0275 0 0 0
0 0 0 0 0 0 0.0008 ─0.0276 1.853 0 0 0
0 0 0 0 0 0 1.1157 ─0.1033 ─0.0028 0 50.0349 0
0 0 0 0 0 0 0 0.7367 0.0199 ─33.1844 0 0
0 0 0 0 0 0 0.0001 ─0.7063 ─0.5452 0 0 0
Matriz B
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
-2.5614 0 0 5.4327
94.9222 0 0 0.1466
0 0 527.3306 -8.3396
0 349.7392 0 0.1127
15.7464 -0.0302 0.1415 -58.1537
A parte del modelo del helicóptero, ha sido necesario el desarrollo de sistemas de aumento de estabilidad para poder tener un helicóptero estable. Con este fin se ha implementado:
• un giróscopo de cola para la dinámica de cola.
• una barra estabilizadora para la dinámica del plato cíclico.
• un control en velocidad de ascenso, para la dinámica del colectivo.
El desarrollo de estos elementos se ha realizado de acuerdo al modelo presentado por Bernard Mettler [2].

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 47 -
- Esquema de la simulación
u mando
x
Faero
u controlador
Visualización de datos1Terminator
u
v w
x
Faero
deulerdt
Helicoptero
x
FlightGear Animation
U-Ver
Ensayos de verificación
u barrido
ctrl
Ensayos de identificación
x
ubarrido
ctrl
u
winds
umando
Control Manual &
Controlador1
0
Constant1
U_Data
Y_DataFaeroData
U_Data1CIFER Y_Data1
- Realización de los ensayos A igual que en el caso del MEGASTAR se ha recurrido al simulador FlightGear
para visualizar los datos, un gamepad para mantener las condiciones de trimado y un bloque para realizar los ensayos de identificación y verificación.
Uno de los problemas que aparecen en los ensayos a vuelo a punto fijo es la ausencia de sensación de velocidad lo cual dificulta enormemente realizar esta maniobra. Dicho problema se solucionó parcialmente multiplicando por una constante los datos de posición que se les pasa al FlightGear, y con la herramienta XYGraph de Simulink, la cual permite ver en tiempo real la posición del helicóptero en el plano XY.
Helicopter Dynamics

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 48 -
- Proceso de identificación de la dinámica del helicóptero El proceso seguido para la identificación del helicóptero ha sido la que realizó
Mettler en su libro [2] para la identificación del Yamaha R-50 salvo algunas modificaciones que se comentarán más adelante.
o Frecuencia de muestreo: 100 Hz
o Filtrado: (-3db @ 10 Hz)
Véase en el anexo II la telemetría de los ensayos de simulación del CB-5000.
Parámetros de las ventanas. Elegidos de manera heurística.
Procesando los datos mediante CIFER se ha obtenido las respuestas en frecuencia del helicóptero. Dichas respuestas pueden verse en el apartado de verificación en frecuencia junto con las respuestas en frecuencia del modelo identificado.
Elección del rango de frecuencias [Hz]
pc py px pt
q1 - - - -
q2 - - - -
q3 - - - -
q4 - 4-30 5-30 10-30
q5 - 4-30 1-30 10-30
q6 - - - 5-40
u1 - - - -
u2 - - - 5-30
u3 4-35 - - -
u4 10-30 2-30 3-30 4-30
u5 4-25 4-30 0.8-30 4-30
u6 4-50 - - 4-35

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 49 -
El modelo usado para la identificación es una modificación del modelo lineal presentado anteriormente. Dicha modificación consiste en incorporar al modelo los efectos de los controladores para obtener una buena identificación. Para ello es necesario ampliar el número de ecuaciones del modelo y la modificación de otras.
- Ecuaciones algebraicas del modelo linealizado original
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⋅
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⋅
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
ptpypxpc
ptKupyKupxKupcKuptKupxKuptKupyKuptKupcKuptKupcKu
uuuuuuqqqqqq
uKuuKuuKuuKuuKuuKu
uKuuKuuKuuKuuKuuKuuKuuKuuKuuKuqKu
qKuqKu
uuuuuuqqqqqq
dtd
666650504400300320020000000000000000000000000000
654321654321
0003626160000000045352500000000540342414000000000332313000000000322212004200000000061510000100000000000010000000000001000000000000100000000000010000000000001000000
654321654321
- Barra estabilizadora Ecuaciones que gobiernan el movimiento de batimiento de la barra
estabilizadora,
pyDudd pyss +−−= 4ττ &
pxCucc pxss +−−= 5ττ &
donde d y c representan la inclinación lateral y longitudinal del plano de puntas de la barra estabilizadora.
La introducción de dichas ecuaciones en el modelo se ha realizado de manera distinta a la que viene en el libro de Mettler [2].
Esquema del modelo de Mettler
Este mismo esquema no se puede usar porque el modelo de helicóptero empleado no reproduce el movimiento de batimiento de las palas del rotor principal. Por ello el efecto de la barra estabilizadora hay que introducirlo directamente en las ecuaciones que gobiernan la actitud del helicóptero.
dAukukukuku duuuuuuuu ++++= 5321 543424144&
cAukukukuku cuuuuuuuu ++++= 4321 453525155&
Mov. batimiento de la barra
Estabilizadora (c,d)
Mov. batimiento de las palas del rotor
principal. (a,b)
Actitud del helicóptero.
(u4,u5)
Mov. batimiento de la barra
Estabilizadora (c,d)
Actitud del helicóptero.
(u4,u5)

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 50 -
- Giróscopo de cola El control de cola se ha modelado como un filtro paso-bajo y la dinámica de la
cola como un sistema de primer orden.
66
6
uu
ptu
KsK
Gt−
= fbfbuu
fbuufb
KsK
uu
Gc66
66
66
+==
La función de transferencia del sistema en bucle cerrado:
( )( ) ( )fbfbuuuuptufbuuuufbfbuu
fbfbuuptubc KKKKsKKs
KsKptuG
666666666662
6666⋅−⋅+⋅−+
+⋅==
Pasando a la forma de espacio de estados se tienen las siguientes ecuaciones diferenciales:
( )fbptuuuuuuu uptKuKuKuKu 63216 6362616 −+++=&
666 6666 uKuKu fbuufbfbfbuufb ⋅+−=&
Para evitar problemas de sobreparametrización es necesario introducir una restricción a las ecuaciones. Dicha restricción consiste en imponer que el polo del filtro paso bajo debe ser dos veces más rápido que el polo de la dinámica de la cola.
6666 2 uufbfbuu KK ⋅−=
Debido a esta restricción, el valor de Nr no tiene necesariamente porque tener significado físico. Esto no debería ser una gran limitación ya que dicho control de cola puede retenerse en diseños futuros de controladores como parte de la dinámica del helicóptero.
- Control de velocidad de ascenso La metodología usada para introducir este controlador en el sistema de ecuaciones ha sido el mismo que en el control de cola obteniéndose los siguientes resultados:
→⋅+
=→
⎪⎪⎭
⎪⎪⎬
⎫
+==
−=
GcGG
G
fbKsK
uu
Gc
KsK
G
u
ubc
fbuu
fbuufb
uu
pcuu
3
3
33
33
33
33
13
3
Dinámica de la cola
Gt u6 pt
Ctrl. de cola Gc
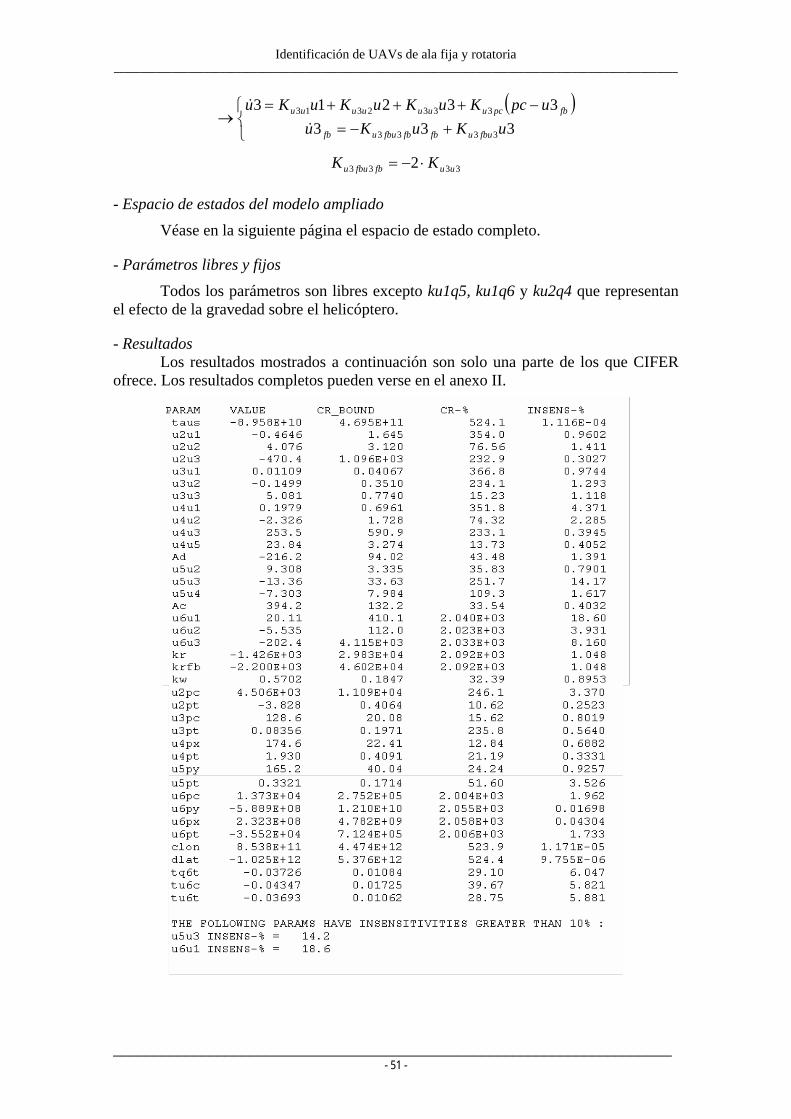
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 51 -
( )⎩⎨⎧
+−=−+++=
→333
33213
3333
3332313
uKuKuupcKuKuKuKu
fbuufbfbfbuufb
fbpcuuuuuuu
&
&
3333 2 uufbfbuu KK ⋅−=
- Espacio de estados del modelo ampliado
Véase en la siguiente página el espacio de estado completo.
- Parámetros libres y fijos
Todos los parámetros son libres excepto ku1q5, ku1q6 y ku2q4 que representan el efecto de la gravedad sobre el helicóptero.
- Resultados Los resultados mostrados a continuación son solo una parte de los que CIFER ofrece. Los resultados completos pueden verse en el anexo II.

⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⋅
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−
−−
−
−=
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⋅⋅
dcfbufbu
uuuuuuqqqqqq
TsTs
fbukufbfbukufbuku
ptKuukuukuukuukuAcukuukuuku
AdukuukuukupckuuKuukuuku
ukuukuukuqkuqkuqku
dTscTs
fbufbu
uuuuuuqqqqqq
dtd
63
654321654321
1000000000000000100000000000000000660000000000000033000330000000000600045362616000000000054035250000000
000000342414000000000300033231300000000000003222120042000000000000061510000000010000000000000000100000000000000001000000000000000010000000000000000100000000000000001000000
63
654321654321
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⋅
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
ptpypxpc
DlatClon
ptKupyKupxKupcKuptKupxKuptKupyKuptKupcKuptKupcKu
00000000000000666650504400300320020000000000000000000000000000
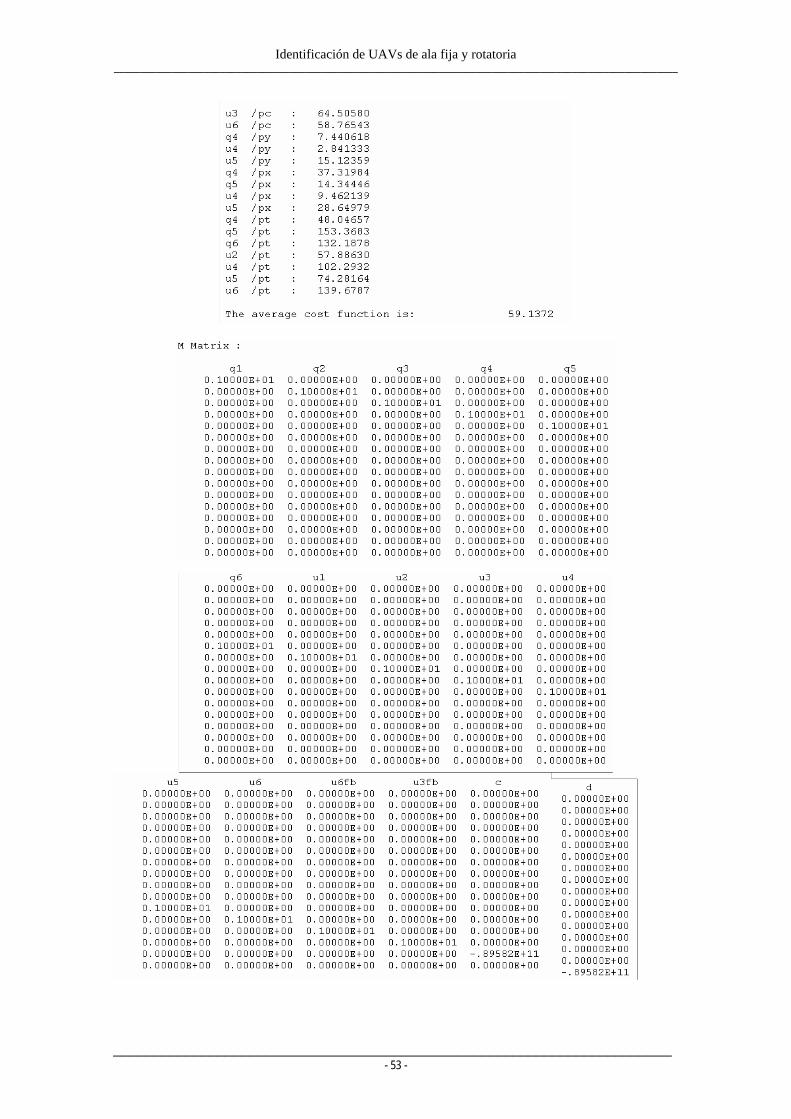
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 53 -
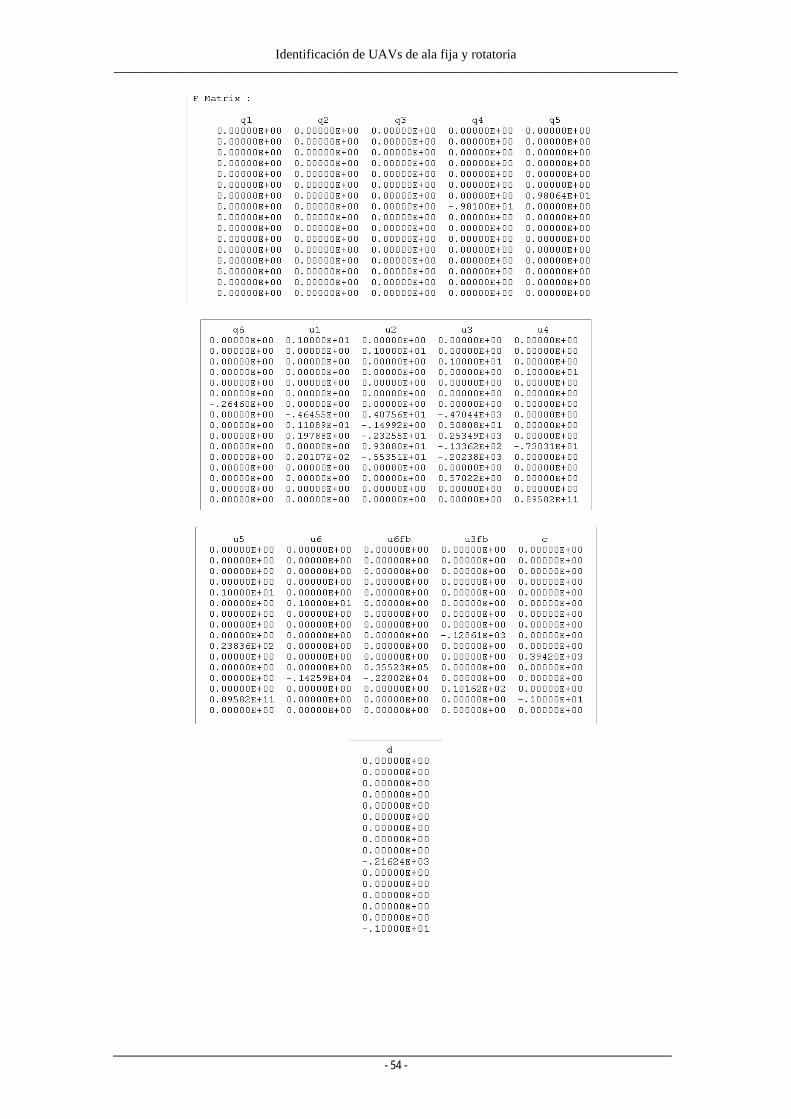
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 54 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 55 -
Los resultados obtenidos no son nada buenos. El análisis estadístico demuestra la poca precisión obtenida durante la identificación con unos valores de RC muy elevados. También puede comprobarse viendo los valores y signos de los distintos parámetros. Fuera de rango en la mayoría de ellos y con cambios en los signos de los mismos. Paradójicamente, la función de coste obtenida es muy buena.
Verificación en el dominio de la frecuencia
Flight resultsVPF10 Id:con ecu de contrl J 100aprox MAtriz corregida
-20
0
20
40
60u3 /pc pc_COM_ABCDE_pc_u3
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-250
-200
-150
-100
-50
0
50u3 /pc pc_COM_ABCDE_pc_u3
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1u3 /pc pc_COM_ABCDE_pc_u3
Frequency (Rad/Sec)
Coh
eren
ce
-60
-40
-20
0
20u6 /pc pc_COM_ABCDE_pc_u6
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-450
-400
-350
-300
-250
-200
-150u6 /pc pc_COM_ABCDE_pc_u6
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1u6 /pc pc_COM_ABCDE_pc_u6
Frequency (Rad/Sec)
Coh
eren
ce
-40
-20
0
20
40q4 /py py_COM_ABCDE_py_q4
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-250
-200
-150
-100
-50
0
50q4 /py py_COM_ABCDE_py_q4
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1q4 /py py_COM_ABCDE_py_q4
Frequency (Rad/Sec)
Coh
eren
ce

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 56 -
-20
0
20
40
60u4 /py py_COM_ABCDE_py_u4
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-150
-100
-50
0
50
100
150u4 /py py_COM_ABCDE_py_u4
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
0.2
0.4
0.6
0.8
1u4 /py py_COM_ABCDE_py_u4
Frequency (Rad/Sec)
Coh
eren
ce
-40
-20
0
20
40u5 /py py_COM_ABCDE_py_u5
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-450
-400
-350
-300
-250
-200
-150u5 /py py_COM_ABCDE_py_u5
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
0.2
0.4
0.6
0.8
1u5 /py py_COM_ABCDE_py_u5
Frequency (Rad/Sec)
Coh
eren
ce
-60
-40
-20
0
20q4 /px px_COM_ABCDE_px_q4
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-150
-100
-50
0
50
100
150q4 /px px_COM_ABCDE_px_q4
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1q4 /px px_COM_ABCDE_px_q4
Frequency (Rad/Sec)
Coh
eren
ce
Flight resultsVPF10 Id:con ecu de contrl J 100aprox MAtriz corregida
-40
-20
0
20
40q5 /px px_COM_ABCDE_px_q5
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-450
-400
-350
-300
-250
-200
-150q5 /px px_COM_ABCDE_px_q5
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
0.2
0.4
0.6
0.8
1q5 /px px_COM_ABCDE_px_q5
Frequency (Rad/Sec)
Coh
eren
ce
-40
-20
0
20
40u4 /px px_COM_ABCDE_px_u4
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-450
-400
-350
-300
-250
-200
-150u4 /px px_COM_ABCDE_px_u4
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
0.2
0.4
0.6
0.8
1u4 /px px_COM_ABCDE_px_u4
Frequency (Rad/Sec)
Coh
eren
ce
-20
0
20
40
60u5 /px px_COM_ABCDE_px_u5
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-350
-300
-250
-200
-150
-100
-50u5 /px px_COM_ABCDE_px_u5
Frequency (Rad/Sec)
Phas
e (D
eg)
10-1
100
101
0.2
0.4
0.6
0.8
1u5 /px px_COM_ABCDE_px_u5
Frequency (Rad/Sec)
Coh
eren
ce

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 57 -
-80
-60
-40
-20
0q4 /pt pt_COM_ABCDE_pt_q4
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-200
-150
-100
-50
0
50
100q4 /pt pt_COM_ABCDE_pt_q4
Frequency (Rad/Sec)
Phas
e (D
eg)
101
102
0.2
0.4
0.6
0.8
1q4 /pt pt_COM_ABCDE_pt_q4
Frequency (Rad/Sec)
Coh
eren
ce
-80
-60
-40
-20
0q5 /pt pt_COM_ABCDE_pt_q5
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-500
-450
-400
-350
-300
-250
-200q5 /pt pt_COM_ABCDE_pt_q5
Frequency (Rad/Sec)
Phas
e (D
eg)
101
102
0.2
0.4
0.6
0.8
1q5 /pt pt_COM_ABCDE_pt_q5
Frequency (Rad/Sec)
Coh
eren
ce
-60
-40
-20
0
20q6 /pt pt_COM_ABCDE_pt_q6
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-400
-350
-300
-250
-200
-150
-100q6 /pt pt_COM_ABCDE_pt_q6
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1q6 /pt pt_COM_ABCDE_pt_q6
Frequency (Rad/Sec)
Coh
eren
ce
Flight resultsVPF10 Id:con ecu de contrl J 100aprox MAtriz corregida
-60
-40
-20
0
20u2 /pt pt_COM_ABCDE_pt_u2
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-500
-450
-400
-350
-300
-250
-200u2 /pt pt_COM_ABCDE_pt_u2
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1u2 /pt pt_COM_ABCDE_pt_u2
Frequency (Rad/Sec)
Coh
eren
ce
-80
-60
-40
-20
0u4 /pt pt_COM_ABCDE_pt_u4
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-500
-450
-400
-350
-300
-250
-200u4 /pt pt_COM_ABCDE_pt_u4
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1u4 /pt pt_COM_ABCDE_pt_u4
Frequency (Rad/Sec)
Coh
eren
ce
-80
-60
-40
-20
0u5 /pt pt_COM_ABCDE_pt_u5
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-400
-350
-300
-250
-200
-150
-100u5 /pt pt_COM_ABCDE_pt_u5
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1u5 /pt pt_COM_ABCDE_pt_u5
Frequency (Rad/Sec)
Coh
eren
ce
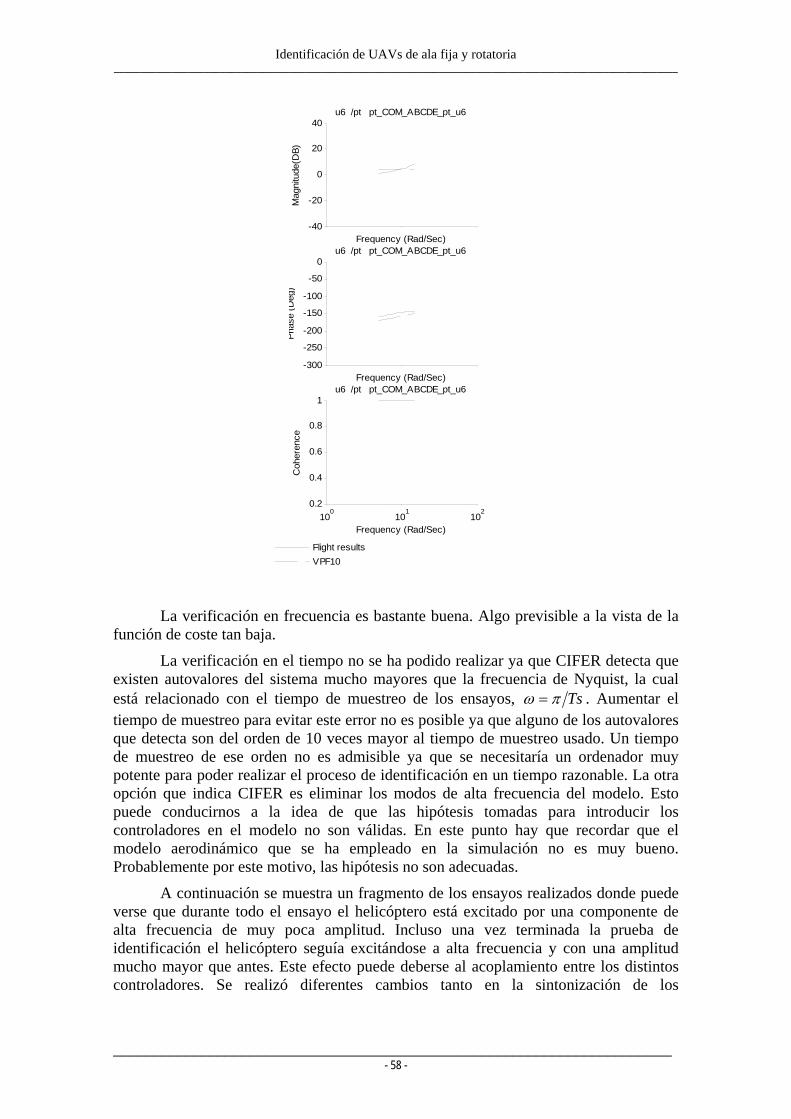
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 58 -
Flight resultsVPF10 Id:con ecu de contrl J 100aprox
-40
-20
0
20
40u6 /pt pt_COM_ABCDE_pt_u6
Frequency (Rad/Sec)
Mag
nitu
de(D
B)
-300
-250
-200
-150
-100
-50
0u6 /pt pt_COM_ABCDE_pt_u6
Frequency (Rad/Sec)
Phas
e (D
eg)
100
101
102
0.2
0.4
0.6
0.8
1u6 /pt pt_COM_ABCDE_pt_u6
Frequency (Rad/Sec)
Coh
eren
ce
La verificación en frecuencia es bastante buena. Algo previsible a la vista de la función de coste tan baja.
La verificación en el tiempo no se ha podido realizar ya que CIFER detecta que existen autovalores del sistema mucho mayores que la frecuencia de Nyquist, la cual está relacionado con el tiempo de muestreo de los ensayos, Tsπω = . Aumentar el tiempo de muestreo para evitar este error no es posible ya que alguno de los autovalores que detecta son del orden de 10 veces mayor al tiempo de muestreo usado. Un tiempo de muestreo de ese orden no es admisible ya que se necesitaría un ordenador muy potente para poder realizar el proceso de identificación en un tiempo razonable. La otra opción que indica CIFER es eliminar los modos de alta frecuencia del modelo. Esto puede conducirnos a la idea de que las hipótesis tomadas para introducir los controladores en el modelo no son válidas. En este punto hay que recordar que el modelo aerodinámico que se ha empleado en la simulación no es muy bueno. Probablemente por este motivo, las hipótesis no son adecuadas.
A continuación se muestra un fragmento de los ensayos realizados donde puede verse que durante todo el ensayo el helicóptero está excitado por una componente de alta frecuencia de muy poca amplitud. Incluso una vez terminada la prueba de identificación el helicóptero seguía excitándose a alta frecuencia y con una amplitud mucho mayor que antes. Este efecto puede deberse al acoplamiento entre los distintos controladores. Se realizó diferentes cambios tanto en la sintonización de los
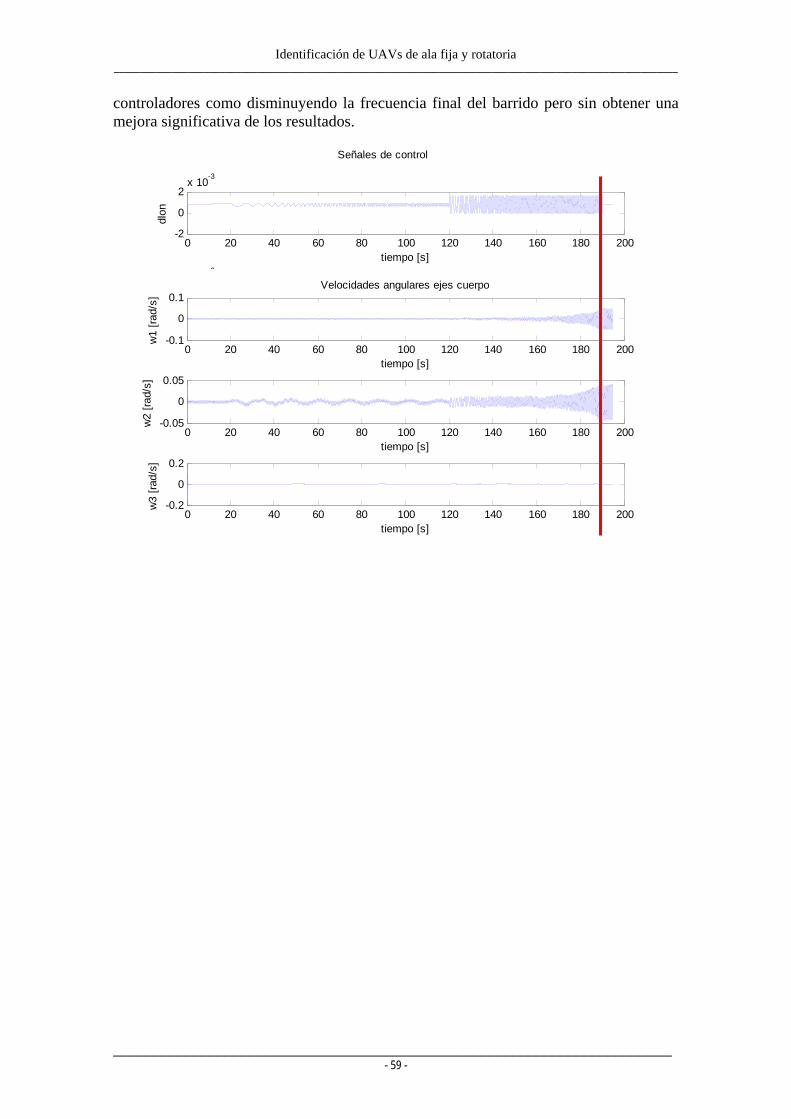
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 59 -
controladores como disminuyendo la frecuencia final del barrido pero sin obtener una mejora significativa de los resultados.
Señales de control
0 20 40 60 80 100 120 140 160 180 200-2
0
2x 10-3
tiempo [s]
dlon
3
0 20 40 60 80 100 120 140 160 180 200-0.1
0
0.1
tiempo [s]
w1
[rad/
s]
Velocidades angulares ejes cuerpo
0 20 40 60 80 100 120 140 160 180 200-0.05
0
0.05
tiempo [s]
w2
[rad/
s]
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
tiempo [s]
w3
[rad/
s]
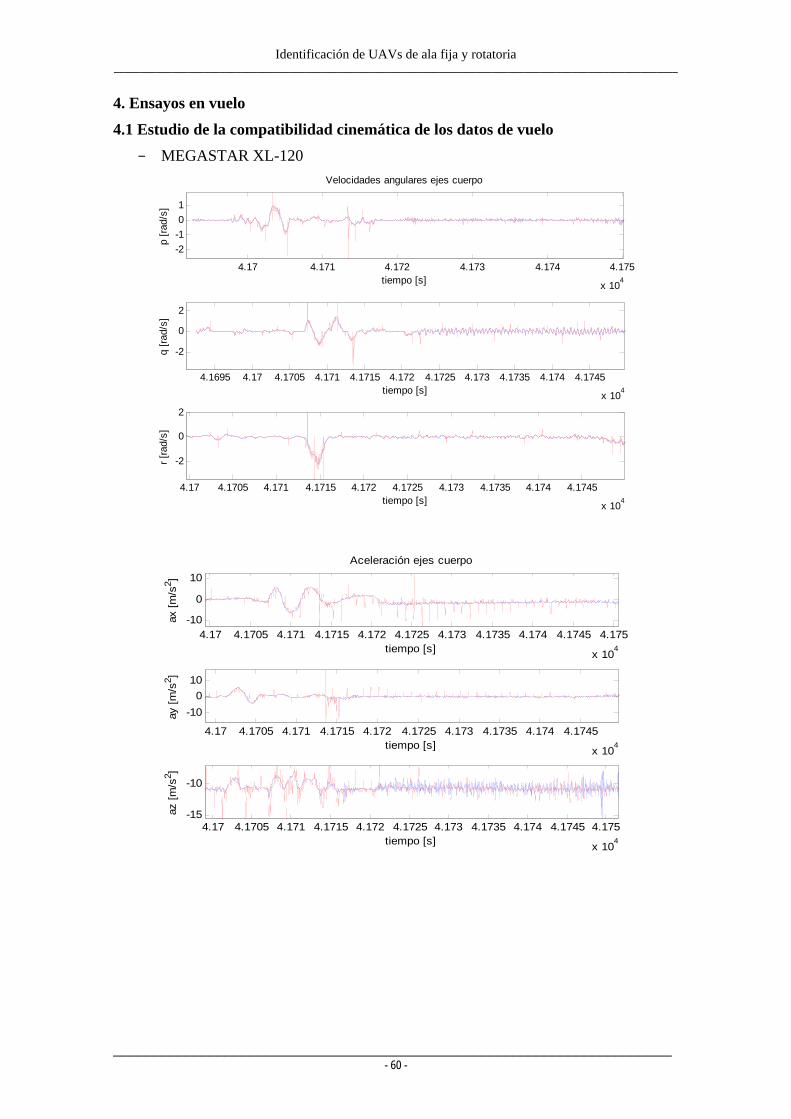
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 60 -
4. Ensayos en vuelo
4.1 Estudio de la compatibilidad cinemática de los datos de vuelo - MEGASTAR XL-120
4.17 4.171 4.172 4.173 4.174 4.175
x 104
-2-101
tiempo [s]
p [ra
d/s]
Velocidades angulares ejes cuerpo
4.1695 4.17 4.1705 4.171 4.1715 4.172 4.1725 4.173 4.1735 4.174 4.1745
x 104
-2
0
2
tiempo [s]
q [ra
d/s]
4.17 4.1705 4.171 4.1715 4.172 4.1725 4.173 4.1735 4.174 4.1745
x 104
-2
0
2
tiempo [s]
r [ra
d/s]
4.17 4.1705 4.171 4.1715 4.172 4.1725 4.173 4.1735 4.174 4.1745 4.175
x 104
-10
0
10
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
4.17 4.1705 4.171 4.1715 4.172 4.1725 4.173 4.1735 4.174 4.1745
x 104
-100
10
tiempo [s]
ay [m
/s2 ]
4.17 4.1705 4.171 4.1715 4.172 4.1725 4.173 4.1735 4.174 4.1745 4.175
x 104
-15
-10
tiempo [s]
az [m
/s2 ]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 61 -
- CB-5000
1360 1380 1400 1420 1440 1460 1480 1500-1
0
1
tiempo [s]
w1
[rad/
s]
Velocidades angulares ejes cuerpo
1360 1380 1400 1420 1440 1460 1480 1500-2
0
2
tiempo [s]
w2
[rad/
s]
1360 1380 1400 1420 1440 1460 1480 1500-5
0
5
tiempo [s]
w3
[rad/
s]
1360 1380 1400 1420 1440 1460 1480 1500-10
0
10
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
1360 1380 1400 1420 1440 1460 1480 1500-5
0
5
tiempo [s]
ay [m
/s2 ]
1360 1380 1400 1420 1440 1460 1480 1500-50
0
50
tiempo [s]
az [m
/s2 ]
Los datos reconstruidos han sido filtrados para intentar eliminar los picos de ruido producido durante la derivación numérica.
A la vista de los resultados puede concluirse de que la telemetría del MEGASTAR XL-120 y del CB-5000 es cinemáticamente compatible y, por tanto, no existe ninguna incompatibilidad entre los diferentes datos.
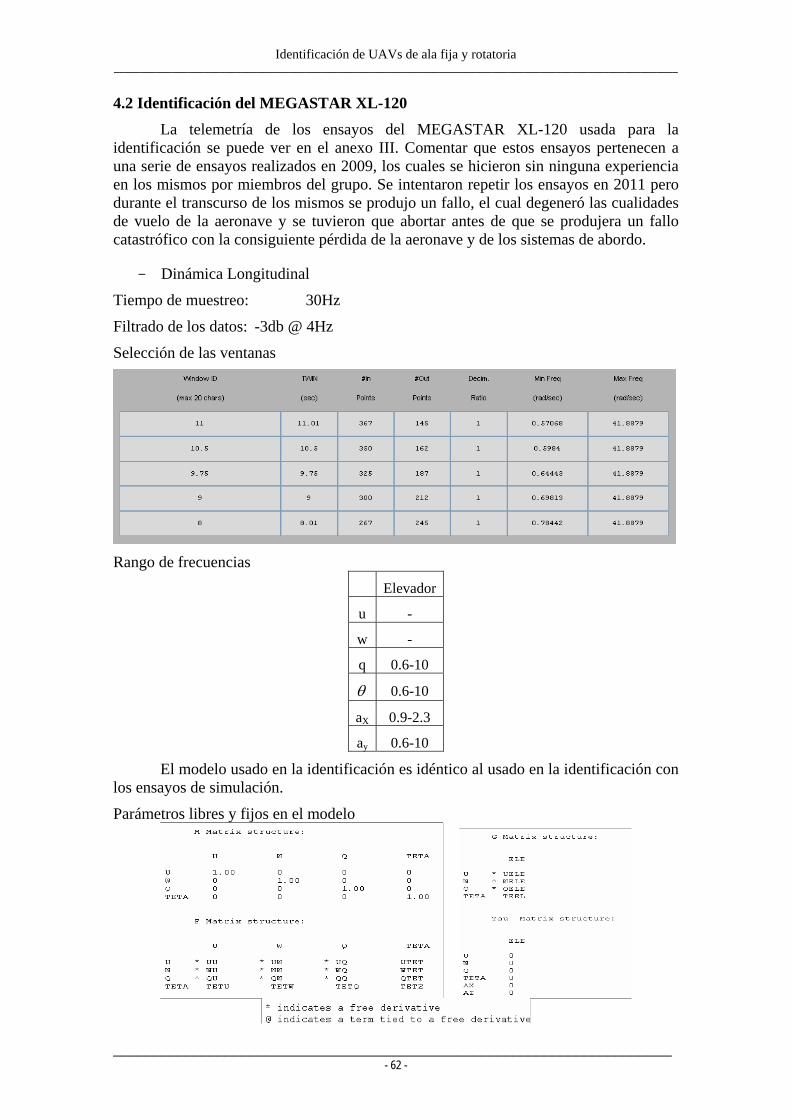
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 62 -
4.2 Identificación del MEGASTAR XL-120 La telemetría de los ensayos del MEGASTAR XL-120 usada para la identificación se puede ver en el anexo III. Comentar que estos ensayos pertenecen a una serie de ensayos realizados en 2009, los cuales se hicieron sin ninguna experiencia en los mismos por miembros del grupo. Se intentaron repetir los ensayos en 2011 pero durante el transcurso de los mismos se produjo un fallo, el cual degeneró las cualidades de vuelo de la aeronave y se tuvieron que abortar antes de que se produjera un fallo catastrófico con la consiguiente pérdida de la aeronave y de los sistemas de abordo.
- Dinámica Longitudinal
Tiempo de muestreo: 30Hz
Filtrado de los datos: -3db @ 4Hz
Selección de las ventanas
Rango de frecuencias
Elevador
u -
w -
q 0.6-10
θ 0.6-10
aX 0.9-2.3
ay 0.6-10
El modelo usado en la identificación es idéntico al usado en la identificación con los ensayos de simulación.
Parámetros libres y fijos en el modelo

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 63 -
Realizando la identificación se obtienen los siguientes resultados
Realizando un análisis rápido de los signos de las derivadas de estabilidad y
control puede verse que existen algunos parámetros con los signos cambiados. Se ha perdido el significado físico en gran parte de ellos.
A continuación se muestran los resultados estadísticos donde puede corroborarse lo comentado en el párrafo anterior por el elevado valor de CR de casi todos los parámetros unido a la baja insensibilidad y a un valor bajo de la función de coste.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 64 -
Verificación en frecuencia
Flight resultsdinlonP2
-200
204060
AX /ELE ele_COM_ABCDE_ELE_AX
Mag
nitu
de(D
B)
-150-100-50
050
100150 AX /ELE ele_COM_ABCDE_ELE_AX
Phas
e (D
eg)
10-1
100
101
0.20.40.60.8
1 AX /ELE ele_COM_ABCDE_ELE_AX
Frequency (Rad/Sec)
Coh
eren
ce
-200
204060
AZ /ELE ele_COM_ABCDE_ELE_AZ
Mag
nitu
de(D
B)
-200-150-100-50
050
100 AZ /ELE ele_COM_ABCDE_ELE_AZ
Phas
e (D
eg)
10-1
100
101
0.20.40.60.8
1 AZ /ELE ele_COM_ABCDE_ELE_AZ
Frequency (Rad/Sec)
Coh
eren
ce
Flight resultsdinlonP2
-40
-200
2040
Q /ELE ele_COM_ABCDE_ELE_Q
Mag
nitu
de(D
B)
-350-300-250-200-150-100-50
Q /ELE ele_COM_ABCDE_ELE_Q
Phas
e (D
eg)
10-1
100
101
0.2
0.4
0.6
0.81
Q /ELE ele_COM_ABCDE_ELE_Q
Frequency (Rad/Sec)
Coh
eren
ce
-40
-200
2040
TETA/ELE ele_COM_ABCDE_ELE_TETA
Mag
nitu
de(D
B)
-450-400-350-300-250-200-150
TETA/ELE ele_COM_ABCDE_ELE_TETA
Phas
e (D
eg)
10-1
100
101
0.2
0.4
0.6
0.81
TETA/ELE ele_COM_ABCDE_ELE_TETA
Frequency (Rad/Sec)
Coh
eren
ce

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 65 -
Verificación en el tiempo
0 1 2 3 4 5 6 7 8 9 10-0.2
-0.1
0
0.1
0.2
0.3ELE
Time (Sec)C
ontro
l Def
lect
ion
14
16
18
20
22
24U
Res
pons
e
0 1 2 3 4 5 6 7 8 9 10-15
-10
-5
0
5
10W
Time (Sec)
Res
pons
e
-1
-0.5
0
0.5Q
Res
pons
e
0 1 2 3 4 5 6 7 8 9 10-1
-0.5
0
0.5
1TETA
Time (Sec)
Res
pons
e
Flight datadinlonP2
0
1
2
3
4AX
Res
pons
e
0 1 2 3 4 5 6 7 8 9 10-30
-20
-10
0
10AZ
Time (Sec)
Res
pons
e

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 66 -
La verificación en frecuencia y en el tiempo ofrece unos resultados bastante aceptables dado la calidad de los datos disponibles. El modelo estimado es un modelo preciso que recoge fielmente la dinámica longitudinal del avión pero en el que los valores estimados no tienen significado físico. De la experiencia adquirida durante los ensayos de simulación se puede afirmar que la pérdida del significado físico de los parámetros es producida por una mala realización de los ensayos. Principalmente por el breve tiempo de las maniobras de identificación. Este problema podría haberse solucionado realizando la maniobra por etapas, como ya se comentó en el apartado de los ensayos de simulación. Debido al fallo técnico de la aeronave mencionado al principio de este apartado, ha sido imposible su realización y la corroboración experimental de dicha técnica para realizar las maniobras de identificación.
- Dinámica Lateral-Direccional
Tiempo de muestreo: 30Hz
Filtrado de los datos: -3db @ 4Hz
Selección de las ventanas
Rango de frecuencias
Alerón Timón vertical
v - 2-10
p 0.8-10 0.8-6
r 0.8-4.4 0.8-10
φ 0.8-10 2-9
ay 0.8-3.5 0.8-10
El modelo usado en la identificación es idéntico al usado en la identificación de los ensayos de simulación.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 67 -
Parámetros libres y fijos en el modelo
Realizando la identificación se obtienen los siguientes resultados:
Llevando a cabo un análisis de los signos de las derivadas de estabilidad y
control puede verse que también existen algunos parámetros con el signo cambiado. Al igual que antes, el significado físico de algunos elementos se ha perdido. A continuación se muestran los resultados estadísticos.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 68 -
A diferencia de la dinámica longitudinal, los datos estadísticos son bastante buenos, excepto el valor de la función de coste de P/Rud. Destacar de nuevo, la importancia del análisis de signos ya que, en este caso en particular, de la interpretación de los datos estadísticos no es posible deducir la falta de significado físico encontrada con dicho análisis.
Verificación en frecuencia
Flight resultsdinlat1 Id:signos bn datos estadisticos bn fcoste bn
-40
-20
0
20
40P /AIL ail_COM_ABCDE_AIL_P
Mag
nitu
de(D
B)
-350-300-250-200-150-100-50
P /AIL ail_COM_ABCDE_AIL_P
Phas
e (D
eg)
10-1
100
101
0.2
0.4
0.6
0.8
1P /AIL ail_COM_ABCDE_AIL_P
Frequency (Rad/Sec)
Coh
eren
ce
-40
-20
0
20
40R /AIL ail_COM_ABCDE_AIL_R
Mag
nitu
de(D
B)
-500-450-400-350-300-250-200
R /AIL ail_COM_ABCDE_AIL_R
Phas
e (D
eg)
10-1
100
101
0.2
0.4
0.6
0.8
1R /AIL ail_COM_ABCDE_AIL_R
Frequency (Rad/Sec)
Coh
eren
ce
-40
-20
0
20
40PHI /AIL ail_COM_ABCDE_AIL_PHI
Mag
nitu
de(D
B)
-450-400-350-300-250-200-150
PHI /AIL ail_COM_ABCDE_AIL_PHI
Phas
e (D
eg)
10-1
100
101
0.2
0.4
0.6
0.8
1PHI /AIL ail_COM_ABCDE_AIL_PHI
Frequency (Rad/Sec)
Coh
eren
ce
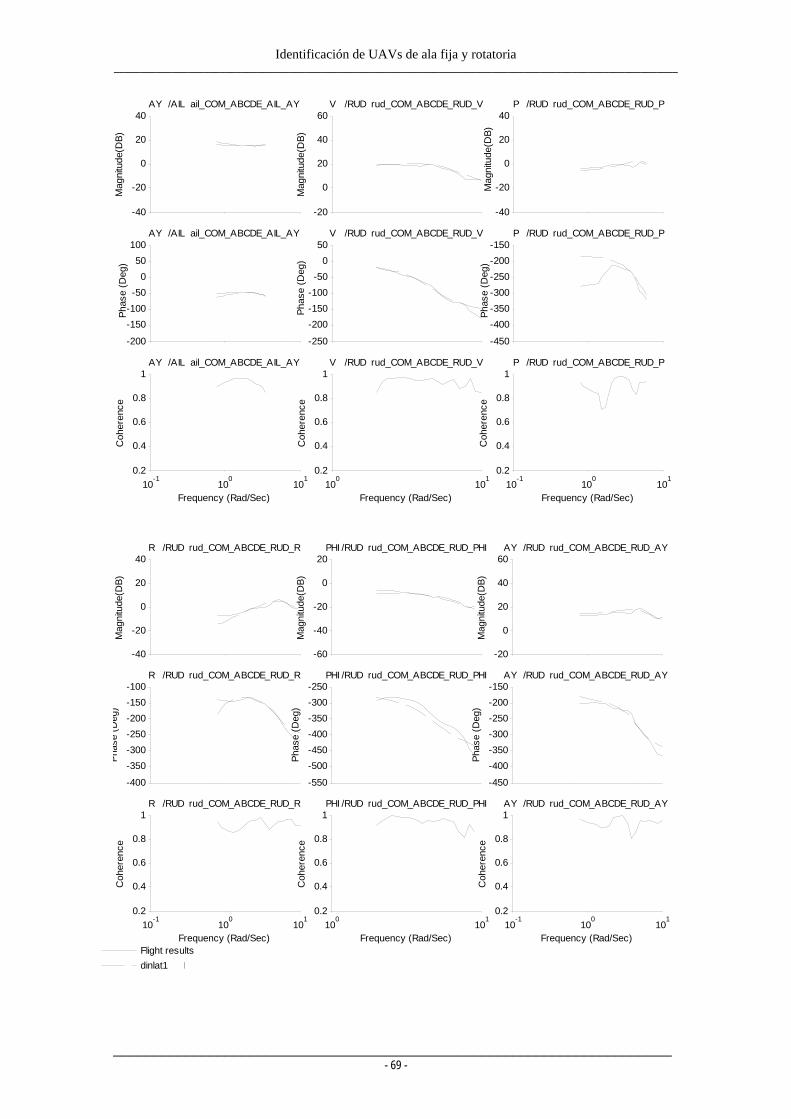
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 69 -
-40
-20
0
20
40AY /AIL ail_COM_ABCDE_AIL_AY
Mag
nitu
de(D
B)
-200
-150-100-50
050
100AY /AIL ail_COM_ABCDE_AIL_AY
Phas
e (D
eg)
10-1
100
101
0.2
0.4
0.6
0.8
1AY /AIL ail_COM_ABCDE_AIL_AY
Frequency (Rad/Sec)
Coh
eren
ce
-20
0
20
40
60V /RUD rud_COM_ABCDE_RUD_V
Mag
nitu
de(D
B)
-250
-200-150-100-50
050
V /RUD rud_COM_ABCDE_RUD_V
Phas
e (D
eg)
100
101
0.2
0.4
0.6
0.8
1V /RUD rud_COM_ABCDE_RUD_V
Frequency (Rad/Sec)
Coh
eren
ce
-40
-20
0
20
40P /RUD rud_COM_ABCDE_RUD_P
Mag
nitu
de(D
B)
-450
-400-350-300-250-200-150
P /RUD rud_COM_ABCDE_RUD_P
Phas
e (D
eg)
10-1
100
101
0.2
0.4
0.6
0.8
1P /RUD rud_COM_ABCDE_RUD_P
Frequency (Rad/Sec)C
oher
ence
Flight resultsdinlat1 Id:signos bn datos estadisticos bn fcoste bn
-40
-20
0
20
40R /RUD rud_COM_ABCDE_RUD_R
Mag
nitu
de(D
B)
-400
-350-300-250-200-150-100
R /RUD rud_COM_ABCDE_RUD_R
Phas
e (D
eg)
10-1
100
101
0.2
0.4
0.6
0.8
1R /RUD rud_COM_ABCDE_RUD_R
Frequency (Rad/Sec)
Coh
eren
ce
-60
-40
-20
0
20PHI /RUD rud_COM_ABCDE_RUD_PHI
Mag
nitu
de(D
B)
-550
-500-450-400-350-300-250
PHI /RUD rud_COM_ABCDE_RUD_PHI
Phas
e (D
eg)
100
101
0.2
0.4
0.6
0.8
1PHI /RUD rud_COM_ABCDE_RUD_PHI
Frequency (Rad/Sec)
Coh
eren
ce
-20
0
20
40
60AY /RUD rud_COM_ABCDE_RUD_AY
Mag
nitu
de(D
B)
-450
-400-350-300-250-200-150
AY /RUD rud_COM_ABCDE_RUD_AY
Phas
e (D
eg)
10-1
100
101
0.2
0.4
0.6
0.8
1AY /RUD rud_COM_ABCDE_RUD_AY
Frequency (Rad/Sec)
Coh
eren
ce
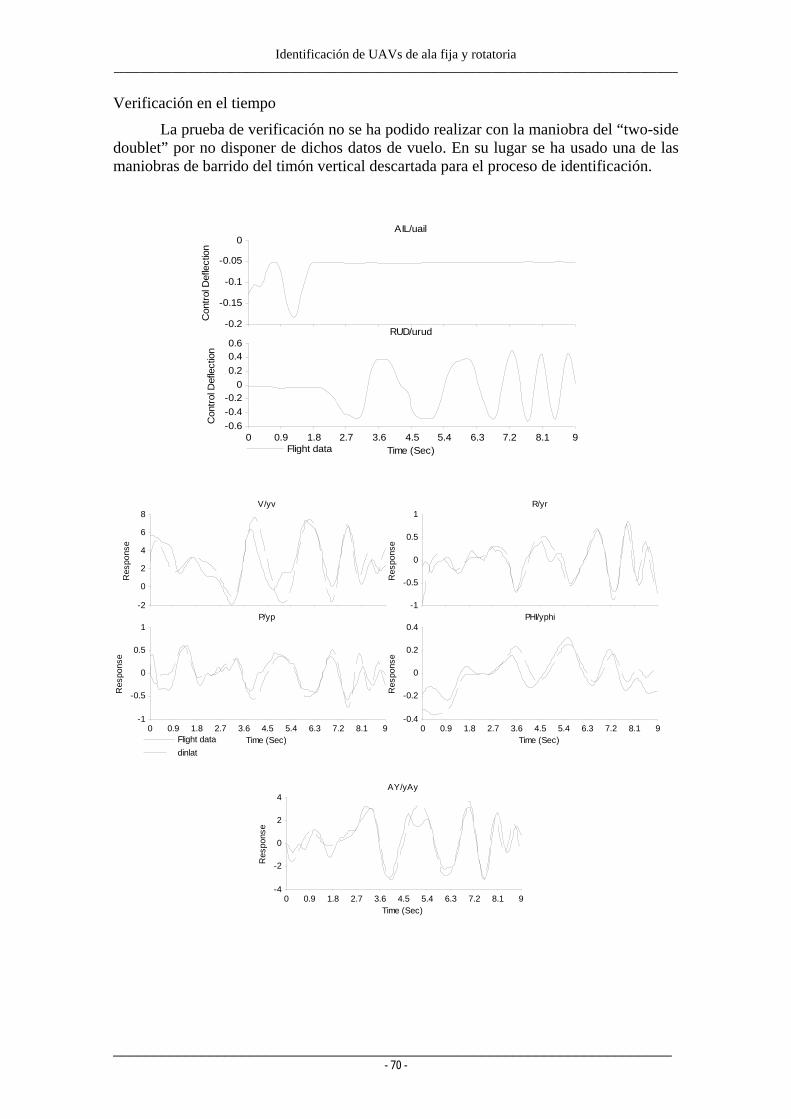
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 70 -
Verificación en el tiempo
La prueba de verificación no se ha podido realizar con la maniobra del “two-side doublet” por no disponer de dichos datos de vuelo. En su lugar se ha usado una de las maniobras de barrido del timón vertical descartada para el proceso de identificación.
Flight data
-0.2
-0.15
-0.1
-0.05
0AIL/uail
Con
trol D
efle
ctio
n
0 0.9 1.8 2.7 3.6 4.5 5.4 6.3 7.2 8.1 9-0.6-0.4-0.2
00.20.40.6
RUD/urud
Time (Sec)
Con
trol D
efle
ctio
n
Flight datadinlat
-2
0
2
4
6
8V/yv
Res
pons
e
0 0.9 1.8 2.7 3.6 4.5 5.4 6.3 7.2 8.1 9-1
-0.5
0
0.5
1P/yp
Time (Sec)
Res
pons
e
-1
-0.5
0
0.5
1R/yr
Res
pons
e
0 0.9 1.8 2.7 3.6 4.5 5.4 6.3 7.2 8.1 9-0.4
-0.2
0
0.2
0.4PHI/yphi
Time (Sec)
Res
pons
e
0 0.9 1.8 2.7 3.6 4.5 5.4 6.3 7.2 8.1 9-4
-2
0
2
4AY/yAy
Time (Sec)
Res
pons
e

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 71 -
5. Conclusiones y trabajos futuros En este proyecto se intenta demostrar la validez del método de identificación de
parámetros en el dominio de la frecuencia, implementado en el programa CIFER, para estimar modelos de UAVs de ala fija, MEGASTAR XL-120, y de ala rotatoria, CB-5000.
El comportamiento de ambos UAVs fue simulado en MATLAB-SIMULINK. Los datos obtenidos fueron procesados con el software de análisis frecuencial CIFER para identificar los parámetros del modelo dinámico para ambos UAVs. La identificación de parámetros del UAV de ala fija resultó satisfactoria tras añadir la solución de alcance visual propuesta en el trabajo. En cambio la identificación de parámetros del CB-5000 no fue adecuada debido a deficiencias de su modelo SIMULINK. Una identificación correcta exigiría la modificación de dicho modelo.
Desafortunadamente, no se pudieron completar los ensayos en vuelo. En el caso del MEGASTAR XL-120 se observó una continua degradación de sus cualidades de vuelo durante las pruebas. Esto hizo imposible la verificación de la identificación realizada con CIFER. En el caso del CB-5000 se unieron averías mecánicas y problemas en el enlace inalámbrico de toma de datos, impidiendo comprobar la validez de la identificación.
Para solventar los problemas encontrados en los ensayos en vuelo se recurrió a un conjunto de datos obtenidos con anterioridad por miembros del grupo sobre el MEGASTAR XL-120. Aunque la calidad de los datos no era óptima, permitieron una buena verificación temporal del modelo identificado para dicho UAV, lo que nos permite demostrar la viabilidad del método de identificación basado en CIFER para el avión.
En el caso del helicóptero, lamentablemente, no se disponía de datos previos para la verificación. No obstante, el lector interesado puede encontrara en la literatura ejemplos de la aplicación de CIFER en la identificación de parámetros del modelo dinámico de aeronaves de ala rotatoria.
El uso de análisis frecuencial con CIFER representa una herramienta muy interesante para la identificación de parámetros de modelos dinámicos de aeronaves.
Por último agradecer al grupo de Robótica, Visión y Control y a FADA-CATEC por la ayuda prestada tanto en recursos materiales como humanos para la realización de este proyecto.
Como trabajo futuro se pueden citar los siguientes:
- Volver a realizar los ensayos experimentales del MEGASTAR XL-120 y corroborar que las maniobras por etapas permiten obtener buenos resultados como se ha demostrado en el entorno de simulación.
- Volver a realizar los ensayos de simulación del CB-5000 con un simulador distinto como paso previo a la identificación real del mismo.
Una vez obtenida una buena identificación de los mismos pueden plantearse los siguientes trabajos.
- Estudios de estabilidad estática y dinámica y de actuaciones del MEGASTAR XL-120 y del CB-5000.
- Desarrollo de controladores y pilotos automáticos para ambas plataformas.

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 72 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 73 -
Anexo I: Características y datos técnicos
- MEGASTAR XL-120
- CB-5000
CB-5000
Masa en vacío 11.5 kg
Masa de combustible 0.45 Kg
Distancia RM-RC 1.4 m
Rotor principal (RP) Rotor de cola (RC)
Diámetro 1.85 m Diámetro 0.34 cm
Cuerda Media 0.07 m Cuerda Media 0.03 m
Longitud de pala 0.84 m Longitud de pala 0.13 cm
Número de palas 2 Número de palas 2
MEGASTAR XL-120
Envergadura 2.29m Longitud 1.55m
Cuerda Media 0.41m Superficie alar 0.9389 m2
Masa en vacío 7.3 Kg Masa de combustible 0.68 kg

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 74 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 75 -
ANEXO II: Ensayos de simulación
Telemetría - MEGASTAR XL-120 Ensayos de identificación - Elevador
20 40 60 80 100 120 140-3.2
-3-2.8-2.6-2.4-2.2
tiempo [s]
Ele
vado
r [º]
Señal de control
20 40 60 80 100 120 140-0.2
0
0.2
tiempo [s]
Ale
rón
[º]
Señal de control
20 40 60 80 100 120 140
0.14
0.145
0.15
tiempo [s]
Tim
ón v
ertic
al [º
] Señal de control
20 40 60 80 100 120 14022242628
tiempo [s]
u [m
/s]
Velocidad en ejes cuerpo
20 40 60 80 100 120 140
01020
x 10-3
tiempo [s]
v [m
/s]
20 40 60 80 100 120 140
1
1.2
tiempo [s]
w [m
/s]
20 40 60 80 100 120 140-0.1
-0.050
tiempo [s]
p [ra
d/s]
Velocidad angular en ejes cuerpo
20 40 60 80 100 120 140
-0.050
0.05
tiempo [s]
q [ra
d/s]
20 40 60 80 100 120 140-505
10x 10-3
tiempo [s]
r [ra
d/s]
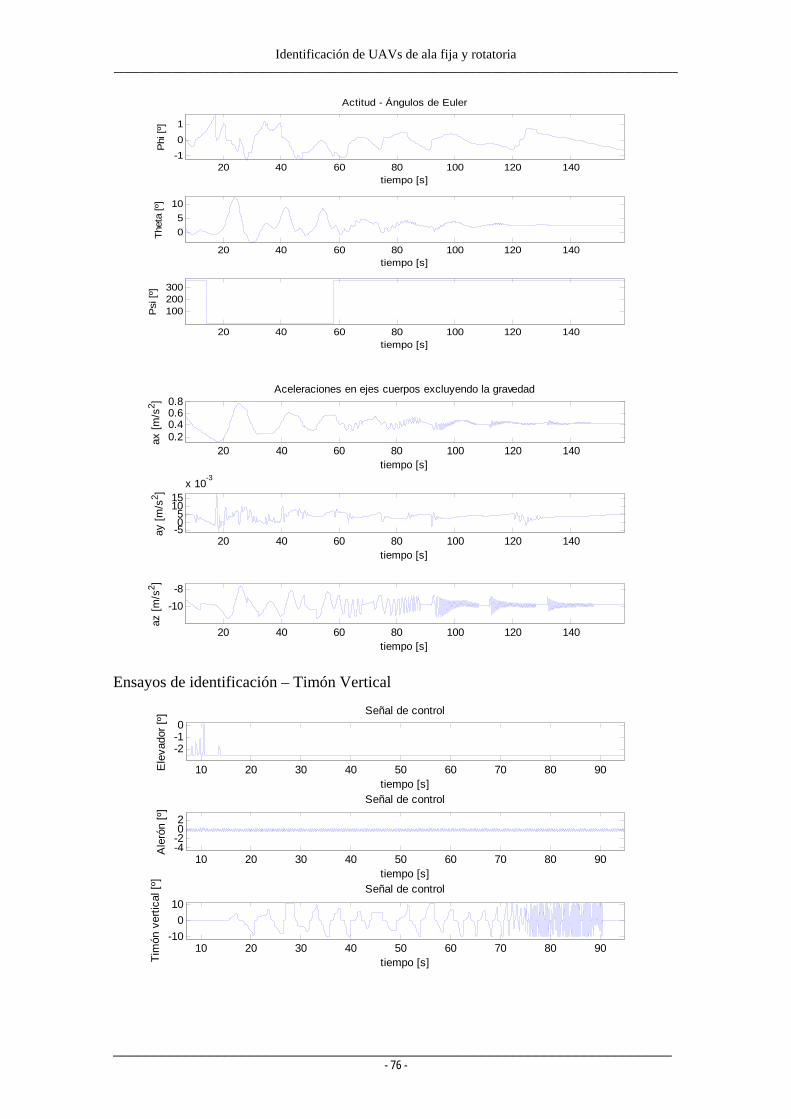
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 76 -
20 40 60 80 100 120 140-101
tiempo [s]
Phi
[º]
Actitud - Ángulos de Euler
20 40 60 80 100 120 140
05
10
tiempo [s]
Thet
a [º
]
20 40 60 80 100 120 140
100200300
tiempo [s]
Psi
[º]
20 40 60 80 100 120 1400.20.40.60.8
tiempo [s]
ax [m
/s2 ]
Aceleraciones en ejes cuerpos excluyendo la gravedad
20 40 60 80 100 120 140-505
1015
x 10-3
tiempo [s]
ay [m
/s2 ]
20 40 60 80 100 120 140
-10-8
tiempo [s]
az [m
/s2 ]
Ensayos de identificación – Timón Vertical
10 20 30 40 50 60 70 80 90
-2-10
tiempo [s]
Ele
vado
r [º] Señal de control
10 20 30 40 50 60 70 80 90-4-202
tiempo [s]
Ale
rón
[º]
Señal de control
10 20 30 40 50 60 70 80 90-10
010
tiempo [s]Tim
ón v
ertic
al [º
]
Señal de control

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 77 -
10 20 30 40 50 60 70 80 90242628
tiempo [s]
u [m
/s]
Velocidad en ejes cuerpo
10 20 30 40 50 60 70 80 90-1012
tiempo [s]
v [m
/s]
10 20 30 40 50 60 70 80 900.60.8
1
tiempo [s]
w [m
/s]
10 20 30 40 50 60 70 80 90
-0.20
0.2
tiempo [s]
p [ra
d/s]
Velocidad angular en ejes cuerpo
10 20 30 40 50 60 70 80 90-0.2-0.1
0
tiempo [s]
q [ra
d/s]
10 20 30 40 50 60 70 80 90-0.5
00.5
tiempo [s]
r [ra
d/s]
10 20 30 40 50 60 70 80 90-10
010
tiempo [s]
Phi
[º]
Actitud - Ángulos de Euler
10 20 30 40 50 60 70 80 90
24
tiempo [s]
Thet
a [º
]
10 20 30 40 50 60 70 80 90
100200300
tiempo [s]
Psi
[º]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 78 -
10 20 30 40 50 60 70 80 900.20.40.6
tiempo [s]
ax [m
/s2 ]
Aceleraciones en ejes cuerpos excluyendo la gravedad
10 20 30 40 50 60 70 80 90-101
tiempo [s]
ay [m
/s2 ]
10 20 30 40 50 60 70 80 90-10
-5
tiempo [s]
az [m
/s2 ]
Ensayos de identificación – Alerones
10 15 20 25 30 35-2.8-2.6-2.4
tiempo [s]
Ele
vado
r [º]
Señal de control
10 15 20 25 30 35-2-101
tiempo [s]
Ale
rón
[º]
Señal de control
10 15 20 25 30 353
3.2
tiempo [s]Tim
ón v
ertic
al [º
]
Señal de control
10 15 20 25 30 3524
26
tiempo [s]
u [m
/s]
Velocidad en ejes cuerpo
10 15 20 25 30 350.30.40.5
tiempo [s]
v [m
/s]
10 15 20 25 30 35
11.051.1
tiempo [s]
w [m
/s]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 79 -
10 15 20 25 30 35-0.2
00.2
tiempo [s]
p [ra
d/s]
Velocidad angular en ejes cuerpo
10 15 20 25 30 35-0.01
00.010.020.03
tiempo [s]
q [ra
d/s]
10 15 20 25 30 35-0.04-0.02
00.020.04
tiempo [s]
r [ra
d/s]
10 15 20 25 30 35-505
tiempo [s]
Phi
[º]
Actitud - Ángulos de Euler
10 15 20 25 30 3512345
tiempo [s]
Thet
a [º
]
10 15 20 25 30 35
100200300
tiempo [s]
Psi
[º]
10 15 20 25 30 35
0.50.550.6
0.65
tiempo [s]
ax [m
/s2 ]
Aceleraciones en ejes cuerpos excluyendo la gravedad
10 15 20 25 30 35
-0.1-0.05
0
tiempo [s]
ay [m
/s2 ]
10 15 20 25 30 35-11
-10
-9
tiempo [s]
az [m
/s2 ]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 80 -
Ensayo de verificación – Dinámica lateral-direccional
0 1 2 3 4 5 6 7 8 9 10-0.05
0
0.05
tiempo [s]
Ale
rone
s [ra
d]
Señales de control
0 1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
tiempo [s]
Tim
ón v
ertic
al [r
ad]
0 1 2 3 4 5 6 7 8 9 10-2
0
2
tiempo [s]
ay [m
/s2 ]
Dinámica lateral-Direccional
0 1 2 3 4 5 6 7 8 9 10-0.2
0
0.2
tiempo [s]
Bet
a [ra
d]
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
tiempo [s]
Phi
[rad
]
0 1 2 3 4 5 6 7 8 9 100
5
10
tiempo [s]
Psi
[rad
]
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
tiempo [s]
p [ra
d/s]
0 1 2 3 4 5 6 7 8 9 10-1
0
1
tiempo [s]
r [ra
d/s]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 81 -
Ensayo de verificación – Dinámica longitudinal
0 2 4 6 8 10 12 14 16 18-0.05
0
0.05
tiempo [s]
Ale
rone
s
Señales de control
0 2 4 6 8 10 12 14 16 180
0.005
0.01
tiempo [s]
Tim
ón v
ertic
al
0 2 4 6 8 10 12 14 16 18-0.5
0
0.5
tiempo [s]
Ele
vado
r
0 2 4 6 8 10 12 14 16 1820
25
30
tiempo [s]
u [m
/s]
Velocidad ejes cuerpo
0 2 4 6 8 10 12 14 16 18-0.1
0
0.1
tiempo [s]
v [m
/s]
0 2 4 6 8 10 12 14 16 18-5
0
5
tiempo [s]
w [m
/s]
0 2 4 6 8 10 12 14 16 18-5
0
5
tiempo [s]
Phi
[º]
Actitud - Euler
0 2 4 6 8 10 12 14 16 18-20
0
20
tiempo [s]
Thet
a [º
]
0 2 4 6 8 10 12 14 16 180
200
400
tiempo [s]
Psi
[º]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 82 -
0 2 4 6 8 10 12 14 16 18-0.5
0
0.5
tiempo [s]
p [ra
d/s]
Velocidades angulares ejes cuerpo
0 2 4 6 8 10 12 14 16 18-2
0
2
tiempo [s]
q [ra
d/s]
0 2 4 6 8 10 12 14 16 18-0.05
0
0.05
tiempo [s]
r [ra
d/s]
0 2 4 6 8 10 12 14 16 18-5
0
5
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
0 2 4 6 8 10 12 14 16 18-0.05
0
0.05
tiempo [s]
ay [m
/s2 ]
0 2 4 6 8 10 12 14 16 18-50
0
50
tiempo [s]
az [m
/s2 ]
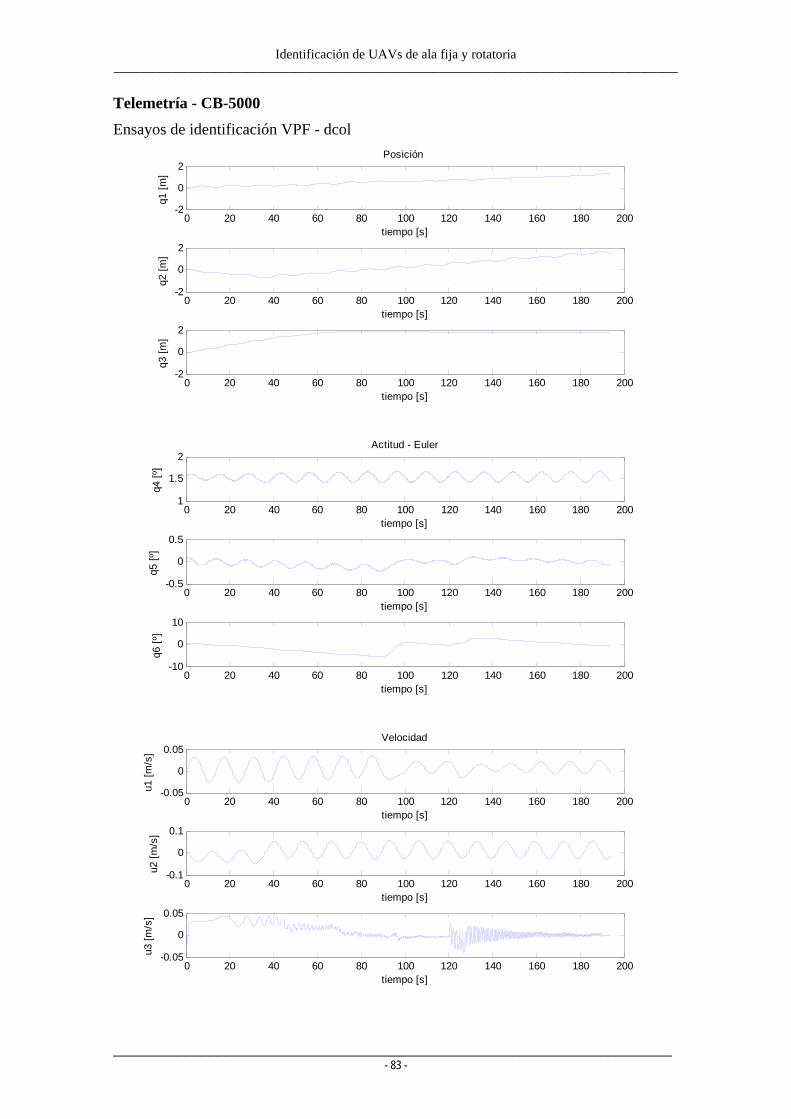
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 83 -
Telemetría - CB-5000 Ensayos de identificación VPF - dcol
0 20 40 60 80 100 120 140 160 180 200-2
0
2
tiempo [s]
q1 [m
]Posición
0 20 40 60 80 100 120 140 160 180 200-2
0
2
tiempo [s]
q2 [m
]
0 20 40 60 80 100 120 140 160 180 200-2
0
2
tiempo [s]
q3 [m
]
0 20 40 60 80 100 120 140 160 180 2001
1.5
2
tiempo [s]
q4 [º
]
Actitud - Euler
0 20 40 60 80 100 120 140 160 180 200-0.5
0
0.5
tiempo [s]
q5 [º
]
0 20 40 60 80 100 120 140 160 180 200-10
0
10
tiempo [s]
q6 [º
]
0 20 40 60 80 100 120 140 160 180 200-0.05
0
0.05
tiempo [s]
u1 [m
/s]
Velocidad
0 20 40 60 80 100 120 140 160 180 200-0.1
0
0.1
tiempo [s]
u2 [m
/s]
0 20 40 60 80 100 120 140 160 180 200-0.05
0
0.05
tiempo [s]
u3 [m
/s]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 84 -
0 20 40 60 80 100 120 140 160 180 200-0.01
0
0.01
tiempo [s]
w1
[rad/
s]
Velocidades angulares ejes cuerpo
0 20 40 60 80 100 120 140 160 180 200-0.02
0
0.02
tiempo [s]
w2
[rad/
s]
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
tiempo [s]
w3
[rad/
s]
0 20 40 60 80 100 120 140 160 180 200-0.1
0
0.1
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
0 20 40 60 80 100 120 140 160 180 200
-0.4
-0.2
0
tiempo [s]
ay [m
/s2 ]
0 20 40 60 80 100 120 140 160 180 200-10
-9.5
tiempo [s]
az [m
/s2 ]
0 20 40 60 80 100 120 140 160 180 200-4
-2
0x 10-4
tiempo [s]
dlat
Señales de control
0 20 40 60 80 100 120 140 160 180 2000
0.5
1x 10-3
tiempo [s]
dlon
0 20 40 60 80 100 120 140 160 180 2000
2
4x 10-3
tiempo [s]
dcol
0 20 40 60 80 100 120 140 160 180 2000
0.05
tiempo [s]
dped
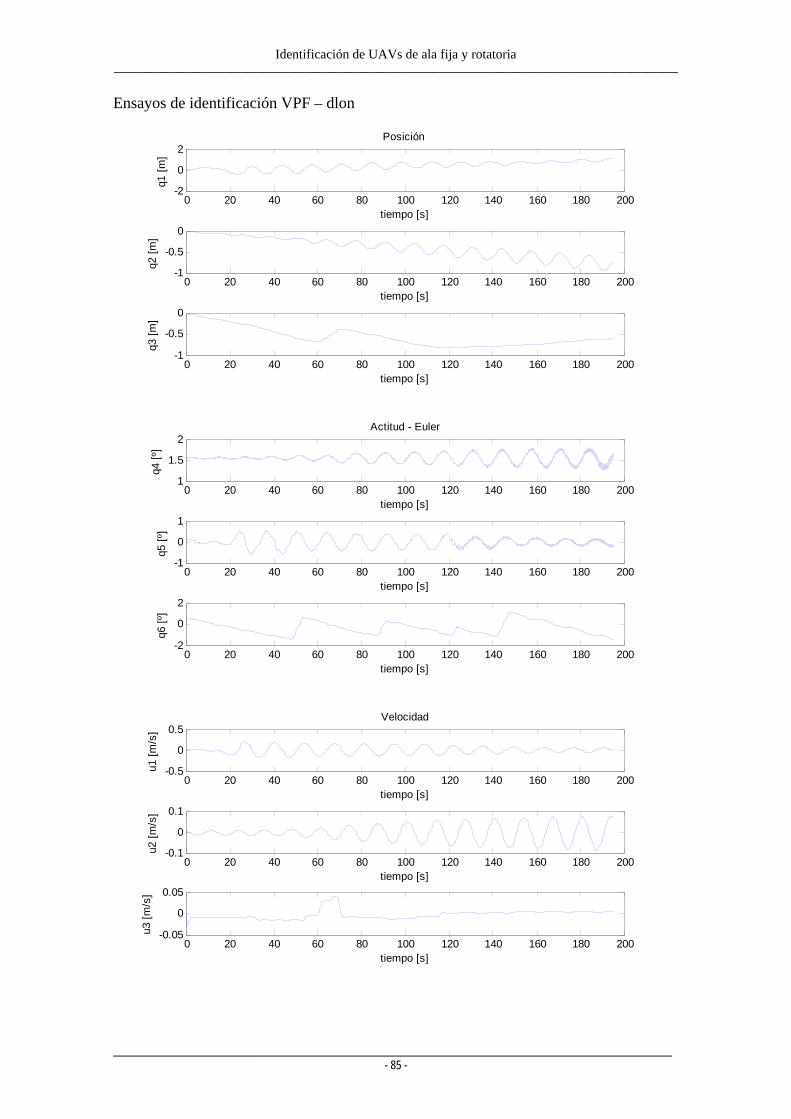
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 85 -
Ensayos de identificación VPF – dlon
0 20 40 60 80 100 120 140 160 180 200-2
0
2
tiempo [s]
q1 [m
]
Posición
0 20 40 60 80 100 120 140 160 180 200-1
-0.5
0
tiempo [s]
q2 [m
]
0 20 40 60 80 100 120 140 160 180 200-1
-0.5
0
tiempo [s]
q3 [m
]
0 20 40 60 80 100 120 140 160 180 2001
1.5
2
tiempo [s]
q4 [º
]
Actitud - Euler
0 20 40 60 80 100 120 140 160 180 200-1
0
1
tiempo [s]
q5 [º
]
0 20 40 60 80 100 120 140 160 180 200-2
0
2
tiempo [s]
q6 [º
]
0 20 40 60 80 100 120 140 160 180 200-0.5
0
0.5
tiempo [s]
u1 [m
/s]
Velocidad
0 20 40 60 80 100 120 140 160 180 200-0.1
0
0.1
tiempo [s]
u2 [m
/s]
0 20 40 60 80 100 120 140 160 180 200-0.05
0
0.05
tiempo [s]
u3 [m
/s]
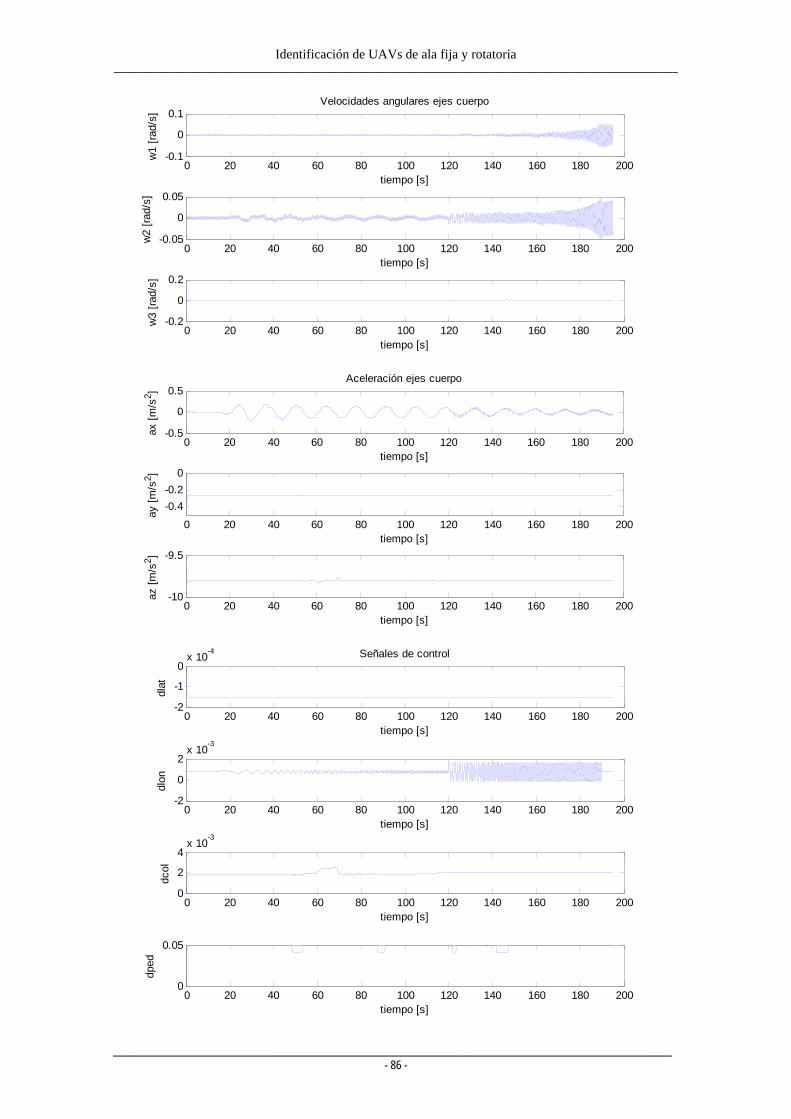
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 86 -
0 20 40 60 80 100 120 140 160 180 200-0.1
0
0.1
tiempo [s]
w1
[rad/
s]
Velocidades angulares ejes cuerpo
0 20 40 60 80 100 120 140 160 180 200-0.05
0
0.05
tiempo [s]
w2
[rad/
s]
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
tiempo [s]
w3
[rad/
s]
0 20 40 60 80 100 120 140 160 180 200-0.5
0
0.5
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
0 20 40 60 80 100 120 140 160 180 200
-0.4-0.2
0
tiempo [s]
ay [m
/s2 ]
0 20 40 60 80 100 120 140 160 180 200-10
-9.5
tiempo [s]
az [m
/s2 ]
0 20 40 60 80 100 120 140 160 180 200-2
-1
0x 10-4
tiempo [s]
dlat
Señales de control
0 20 40 60 80 100 120 140 160 180 200-2
0
2x 10
-3
tiempo [s]
dlon
0 20 40 60 80 100 120 140 160 180 2000
2
4x 10-3
tiempo [s]
dcol
0 20 40 60 80 100 120 140 160 180 2000
0.05
tiempo [s]
dped

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 87 -
Ensayos de identificación VPF – dlat
0 20 40 60 80 100 120 140 160 180 200-2
0
2
tiempo [s]
q1 [m
]
Posición
0 20 40 60 80 100 120 140 160 180 200-2
0
2
tiempo [s]
q2 [m
]
0 20 40 60 80 100 120 140 160 180 200-2
0
2
tiempo [s]
q3 [m
]
0 20 40 60 80 100 120 140 160 180 2000
2
4
tiempo [s]
q4 [º
]
Actitud - Euler
0 20 40 60 80 100 120 140 160 180 200-1
0
1
tiempo [s]
q5 [º
]
0 20 40 60 80 100 120 140 160 180 200-10
0
10
tiempo [s]
q6 [º
]
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
tiempo [s]
u1 [m
/s]
Velocidad
0 20 40 60 80 100 120 140 160 180 200-0.5
0
0.5
tiempo [s]
u2 [m
/s]
0 20 40 60 80 100 120 140 160 180 200-0.1
0
0.1
tiempo [s]
u3 [m
/s]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 88 -
0 20 40 60 80 100 120 140 160 180 200-0.5
0
0.5
tiempo [s]
w1
[rad/
s]
Velocidades angulares ejes cuerpo
0 20 40 60 80 100 120 140 160 180 200-0.5
0
0.5
tiempo [s]
w2
[rad/
s]
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
tiempo [s]
w3
[rad/
s]
0 20 40 60 80 100 120 140 160 180 200-0.5
0
0.5
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
0 20 40 60 80 100 120 140 160 180 200-0.4-0.2
0
tiempo [s]
ay [m
/s2 ]
0 20 40 60 80 100 120 140 160 180 200-10
-9.5
tiempo [s]
az [m
/s2 ]
0 20 40 60 80 100 120 140 160 180 200-202
x 10-3
tiempo [s]
dlat
Señales de control
0 20 40 60 80 100 120 140 160 180 2000
0.51
x 10-3
tiempo [s]
dlon
0 20 40 60 80 100 120 140 160 180 200024
x 10-3
tiempo [s]
dcol
0 20 40 60 80 100 120 140 160 180 2000
0.050.1
tiempo [s]
dped

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 89 -
Ensayos de identificación VPF – dped
0 20 40 60 80 100 120 140 160 180 200-2
0
2
tiempo [s]
q1 [m
]
Posición
0 20 40 60 80 100 120 140 160 180 200-5
0
5
tiempo [s]
q2 [m
]
0 20 40 60 80 100 120 140 160 180 200-0.5
0
0.5
tiempo [s]
q3 [m
]
0 20 40 60 80 100 120 140 160 180 2001
1.5
2
tiempo [s]
q4 [º
]
Actitud - Euler
0 20 40 60 80 100 120 140 160 180 200-0.5
0
0.5
tiempo [s]
q5 [º
]
0 20 40 60 80 100 120 140 160 180 200-5
0
5
tiempo [s]
q6 [º
]
0 20 40 60 80 100 120 140 160 180 200-0.1
0
0.1
tiempo [s]
u1 [m
/s]
Velocidad
0 20 40 60 80 100 120 140 160 180 200-0.05
0
0.05
tiempo [s]
u2 [m
/s]
0 20 40 60 80 100 120 140 160 180 200-0.05
0
0.05
tiempo [s]
u3 [m
/s]
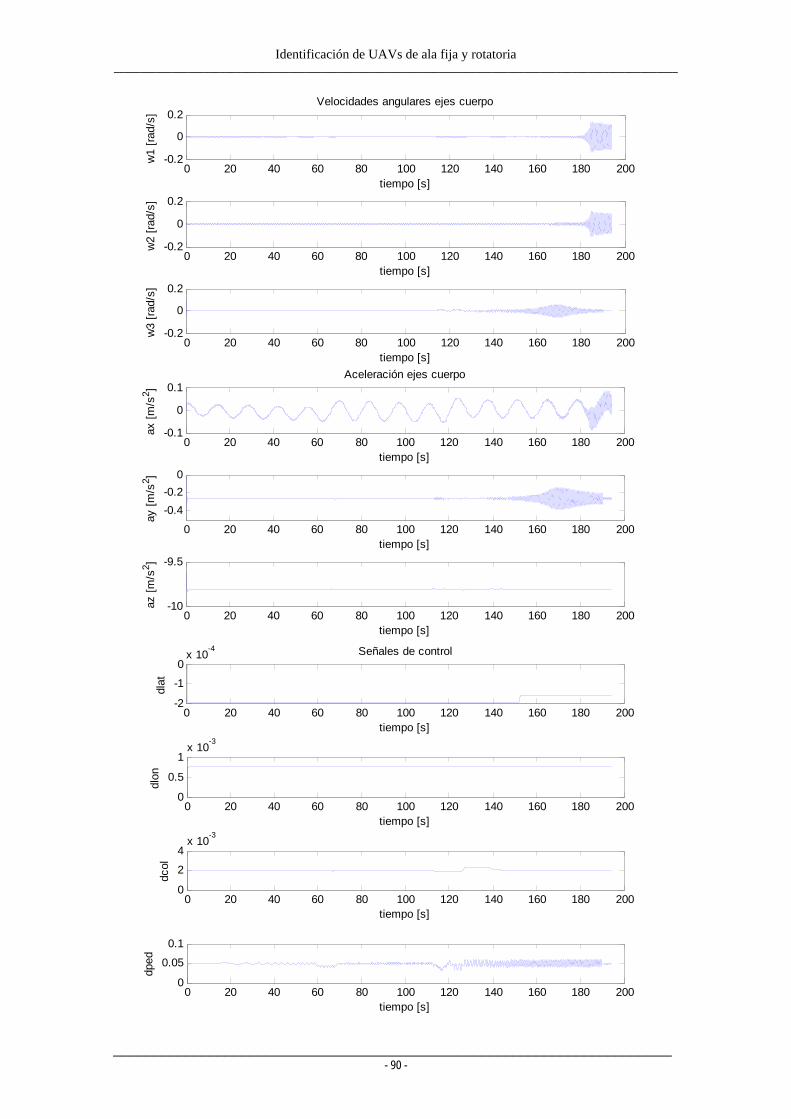
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 90 -
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
tiempo [s]
w1
[rad/
s]
Velocidades angulares ejes cuerpo
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
tiempo [s]
w2
[rad/
s]
0 20 40 60 80 100 120 140 160 180 200-0.2
0
0.2
tiempo [s]
w3
[rad/
s]
0 20 40 60 80 100 120 140 160 180 200-0.1
0
0.1
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
0 20 40 60 80 100 120 140 160 180 200
-0.4-0.2
0
tiempo [s]
ay [m
/s2 ]
0 20 40 60 80 100 120 140 160 180 200-10
-9.5
tiempo [s]
az [m
/s2 ]
0 20 40 60 80 100 120 140 160 180 200-2
-1
0x 10-4
tiempo [s]
dlat
Señales de control
0 20 40 60 80 100 120 140 160 180 2000
0.5
1x 10-3
tiempo [s]
dlon
0 20 40 60 80 100 120 140 160 180 2000
2
4x 10-3
tiempo [s]
dcol
0 20 40 60 80 100 120 140 160 180 2000
0.05
0.1
tiempo [s]
dped

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 91 -
Resultados completos de la identificación del CB-5000
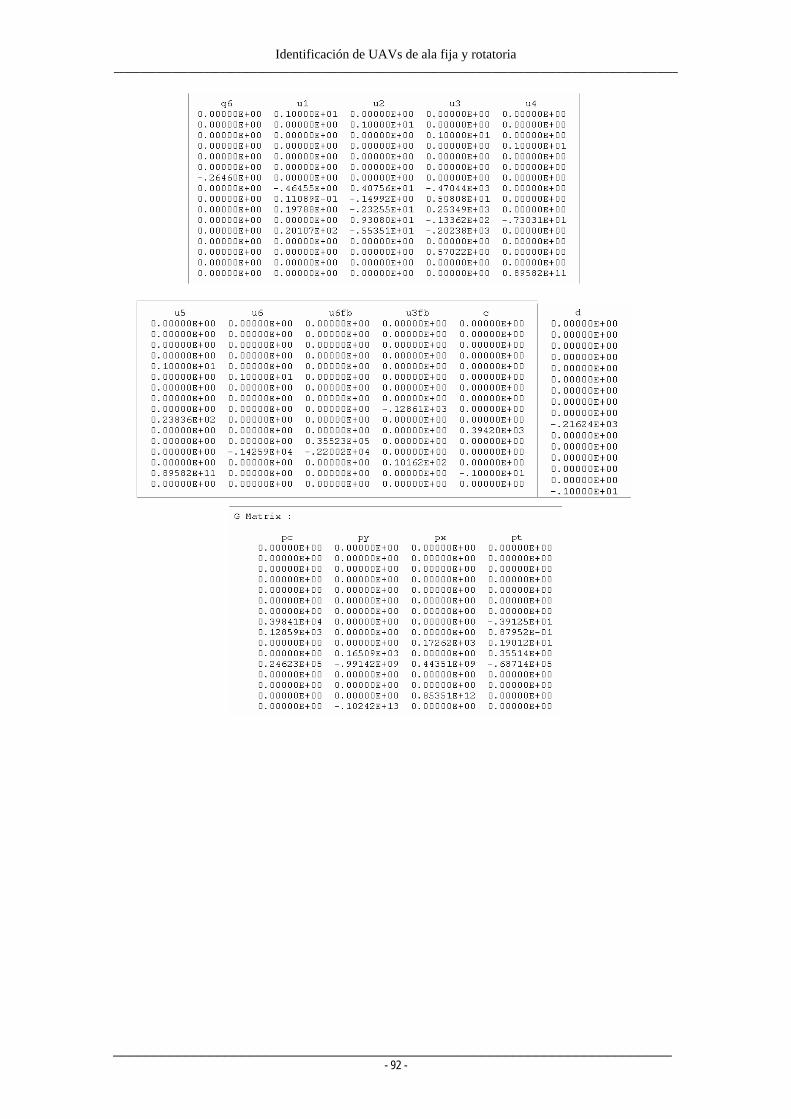
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 92 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 93 -
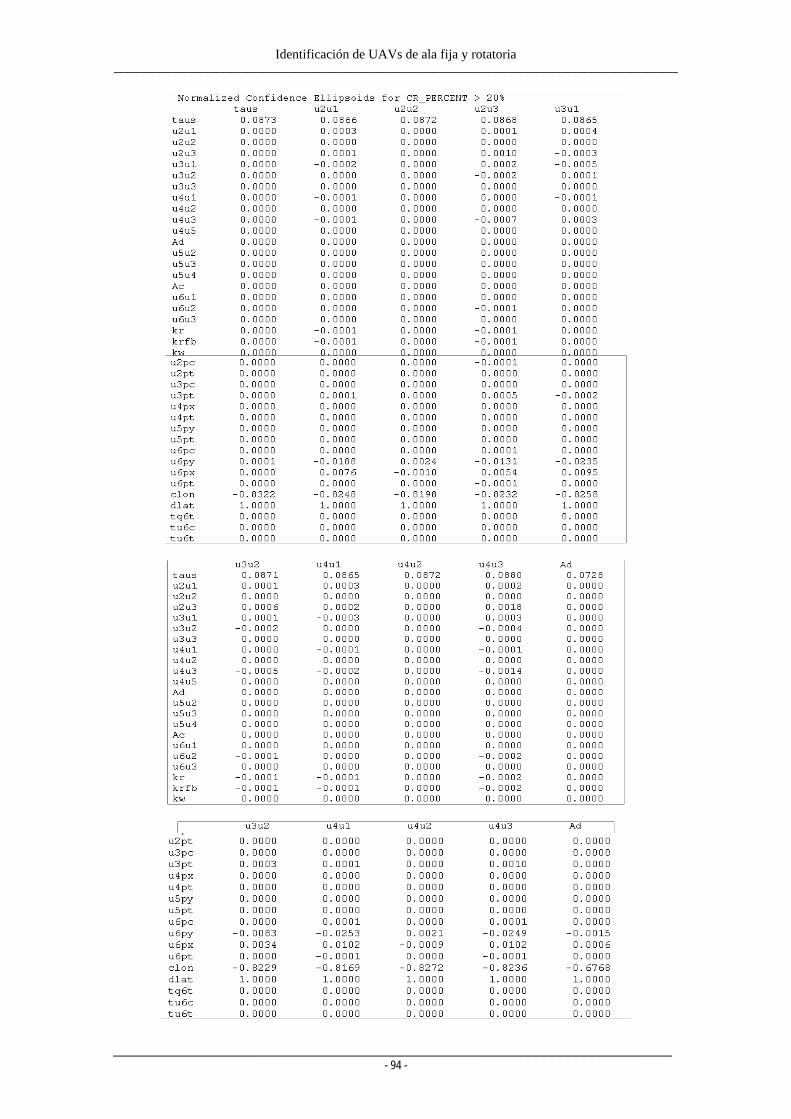
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 94 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 95 -
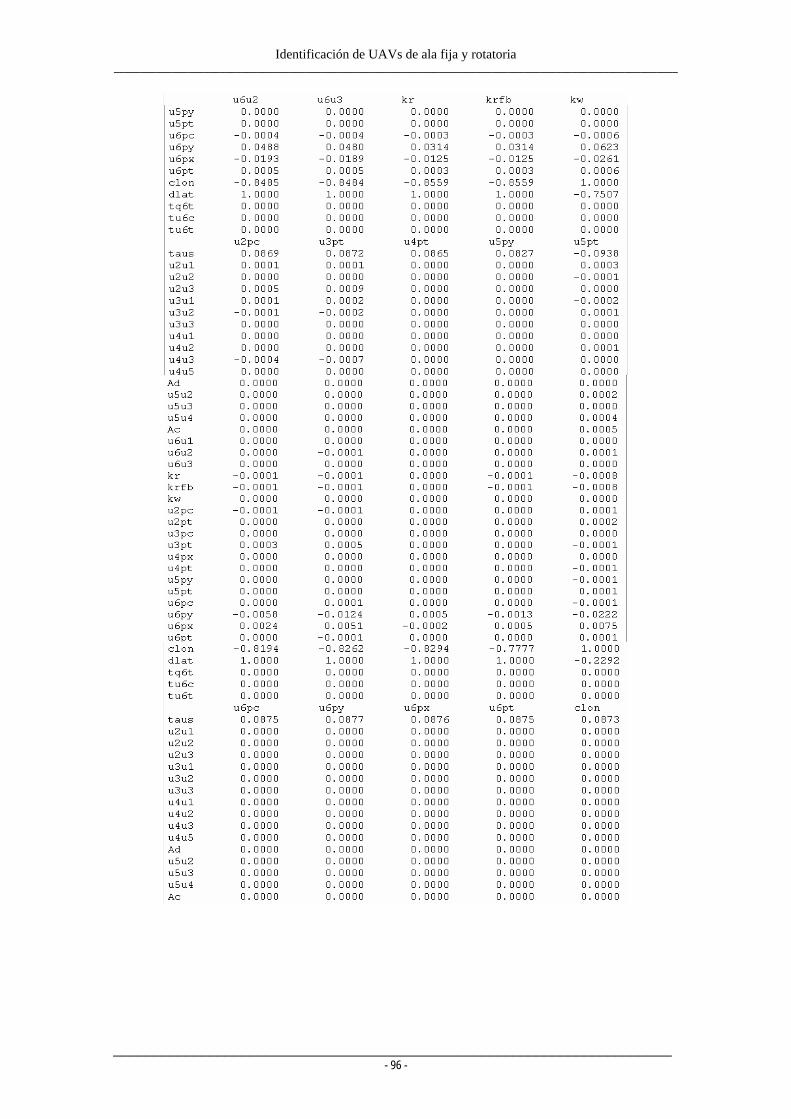
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 96 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 97 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 98 -

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 99 -
Anexo III: Telemetría de los ensayos en vuelo
MEGASTAR XL-120 Ensayo de identificación - Alerones
740 760 780 800 820 840 860 880 900 92037.356
37.358
37.36
tiempo [s]
Latit
ud [º
]
Posición
740 760 780 800 820 840 860 880 900 920-6.135
-6.13
-6.125
tiempo [s]
Long
itud
[º]
740 760 780 800 820 840 860 880 900 920100
200
300
tiempo [s]
Altu
ra [m
]
740 760 780 800 820 840 860 880 900 920-50
0
50
tiempo [s]
Vx
[m/s
]
Velocidad Tierra
740 760 780 800 820 840 860 880 900 920-50
0
50
tiempo [s]
Vy
[m/s
]
740 760 780 800 820 840 860 880 900 920-20
0
20
tiempo [s]
Vz
[m/s
]
740 760 780 800 820 840 860 880 900 920-100
0
100
tiempo [s]
roll
[º]
Actitud - Euler
740 760 780 800 820 840 860 880 900 920-20
0
20
tiempo [s]
pitc
h [º
]
740 760 780 800 820 840 860 880 900 920-200
0
200
tiempo [s]
yaw
[º]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 100 -
740 760 780 800 820 840 860 880 900 920-0.5
0
0.5
tiempo [s]
Ale
rone
s
Señales de control
740 760 780 800 820 840 860 880 900 920-0.2
0
0.2
tiempo [s]
Ele
vado
res
740 760 780 800 820 840 860 880 900 920-0.2
0
0.2
tiempo [s]
Tim
ón v
ertic
al
740 760 780 800 820 840 860 880 900 9200.2
0.3
0.4
0.5
tiempo [s]
Pal
anca
de
gase
s
740 760 780 800 820 840 860 880 900 920-5
0
5
tiempo [s]
p [ra
d/s]
Velocidades angulares ejes cuerpo
740 760 780 800 820 840 860 880 900 920-1
0
1
tiempo [s]
q [ra
d/s]
740 760 780 800 820 840 860 880 900 920-1
0
1
tiempo [s]
r [ra
d/s]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 101 -
740 760 780 800 820 840 860 880 900 920-5
0
5
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
740 760 780 800 820 840 860 880 900 920-5
0
5
tiempo [s]
ay [m
/s2 ]
740 760 780 800 820 840 860 880 900 920-50
0
50
tiempo [s]
az [m
/s2 ]
Ensayo de identificación – Elevador
400 420 440 460 480 500 520 540
37.36
37.365
tiempo [s]
Latit
ud [º
]
Posición
400 420 440 460 480 500 520 540-6.135
-6.13
-6.125
tiempo [s]
Long
itud
[º]
400 420 440 460 480 500 520 5400
100
200
tiempo [s]
Altu
ra [m
]
400 420 440 460 480 500 520 540-50
0
50
tiempo [s]
Vx
[m/s
]
Velocidad Tierra
400 420 440 460 480 500 520 540-50
0
50
tiempo [s]
Vy
[m/s
]
400 420 440 460 480 500 520 540-50
0
50
tiempo [s]
Vz
[m/s
]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 102 -
400 420 440 460 480 500 520 540-100
0
100
tiempo [s]
roll
[º]
Actitud - Euler
400 420 440 460 480 500 520 540-100
0
100
tiempo [s]
pitc
h [º
]
400 420 440 460 480 500 520 540-200
0
200
tiempo [s]
yaw
[º]
400 420 440 460 480 500 520 540-0.5
0
0.5
tiempo [s]
Ale
rone
s
Señales de control
400 420 440 460 480 500 520 540-0.5
0
0.5
tiempo [s]
Ele
vado
res
400 420 440 460 480 500 520 540-0.1
0
0.1
tiempo [s]
Tim
ón v
ertic
al
400 420 440 460 480 500 520 5400.2
0.3
0.4
tiempo [s]
Pal
anca
de
gase
s

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 103 -
400 420 440 460 480 500 520 540-2
0
2
tiempo [s]
p [ra
d/s]
Velocidades angulares ejes cuerpo
400 420 440 460 480 500 520 540-5
0
5
tiempo [s]
q [ra
d/s]
400 420 440 460 480 500 520 540-1
0
1
tiempo [s]
r [ra
d/s]
400 420 440 460 480 500 520 540-10
0
10
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
400 420 440 460 480 500 520 540-5
0
5
tiempo [s]
ay [m
/s2 ]
400 420 440 460 480 500 520 540-50
0
50
tiempo [s]
az [m
/s2 ]
Ensayo de identificación – Timón vertical
1066 1068 1070 1072 1074 1076 107837.356
37.358
37.36
tiempo [s]
Latit
ud [º
]
Posición
1066 1068 1070 1072 1074 1076 1078-6.135
-6.13
-6.125
tiempo [s]
Long
itud
[º]
1066 1068 1070 1072 1074 1076 1078160
180
200
tiempo [s]
Altu
ra [m
]
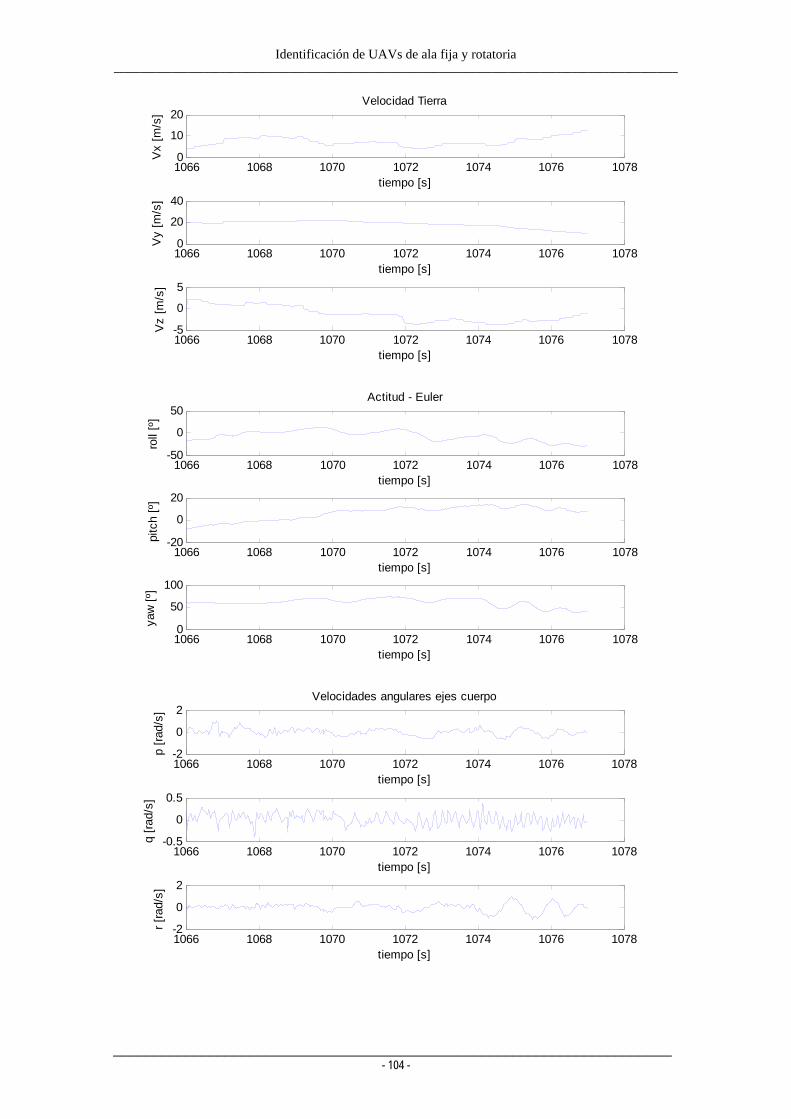
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 104 -
1066 1068 1070 1072 1074 1076 10780
10
20
tiempo [s]
Vx
[m/s
]
Velocidad Tierra
1066 1068 1070 1072 1074 1076 10780
20
40
tiempo [s]
Vy
[m/s
]
1066 1068 1070 1072 1074 1076 1078-5
0
5
tiempo [s]
Vz
[m/s
]
1066 1068 1070 1072 1074 1076 1078-50
0
50
tiempo [s]
roll
[º]
Actitud - Euler
1066 1068 1070 1072 1074 1076 1078-20
0
20
tiempo [s]
pitc
h [º
]
1066 1068 1070 1072 1074 1076 10780
50
100
tiempo [s]
yaw
[º]
1066 1068 1070 1072 1074 1076 1078-2
0
2
tiempo [s]
p [ra
d/s]
Velocidades angulares ejes cuerpo
1066 1068 1070 1072 1074 1076 1078-0.5
0
0.5
tiempo [s]
q [ra
d/s]
1066 1068 1070 1072 1074 1076 1078-2
0
2
tiempo [s]
r [ra
d/s]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 105 -
1066 1068 1070 1072 1074 1076 1078-0.4
-0.2
0
tiempo [s]
Ale
rone
s
Señales de control
1066 1068 1070 1072 1074 1076 1078-0.02
0
0.02
tiempo [s]
Ele
vado
res
1066 1068 1070 1072 1074 1076 1078-0.5
0
0.5
tiempo [s]
Tim
ón v
ertic
al
1066 1068 1070 1072 1074 1076 1078
0.26
0.28
0.3
tiempo [s]
Pal
anca
de
gase
s
1066 1068 1070 1072 1074 1076 1078-5
0
5
tiempo [s]
ax [m
/s2 ]
Aceleración ejes cuerpo
1066 1068 1070 1072 1074 1076 1078-5
0
5
tiempo [s]
ay [m
/s2 ]
1066 1068 1070 1072 1074 1076 1078-40
-20
0
tiempo [s]
az [m
/s2 ]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 106 -
Ensayo de Verificación – Dinámica longitudinal
316 318 320 322 324 326 328 330 332 334 33637.147
37.147537.148
tiempo [s]
Latit
ud [º
] Posición
316 318 320 322 324 326 328 330 332 334 336-5.795-5.79
-5.785
tiempo [s]
Long
itud
[º]
316 318 320 322 324 326 328 330 332 334 336100150200
tiempo [s]
Altu
ra [m
]
316 318 320 322 324 326 328 330 332 334 336-10-50
tiempo [s]
Vx
[m/s
]
Velocidad Tierra
316 318 320 322 324 326 328 330 332 334 336102030
tiempo [s]
Vy
[m/s
]
316 318 320 322 324 326 328 330 332 334 336-20
020
tiempo [s]
Vz
[m/s
]
316 318 320 322 324 326 328 330 332 334 336-50
050
tiempo [s]
roll
[º]
Actitud - Euler
316 318 320 322 324 326 328 330 332 334 336-50
050
tiempo [s]
pitc
h [º
]
316 318 320 322 324 326 328 330 332 334 33690
100110
tiempo [s]
yaw
[º]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 107 -
316 318 320 322 324 326 328 330 332 334 336-0.5
0
0.5
tiempo [s]
Ale
rone
sSeñales de control
316 318 320 322 324 326 328 330 332 334 336-0.5
0
0.5
tiempo [s]
Ele
vado
res
316 318 320 322 324 326 328 330 332 334 336-0.1
-0.05
0
tiempo [s]
Tim
ón v
ertic
al
316 318 320 322 324 326 328 330 332 334 3360.2
0.3
0.4
tiempo [s]
Pal
anca
de
gase
s
316 318 320 322 324 326 328 330 332 334 336-2
0
2
tiempo [s]
p [ra
d/s]
Velocidades angulares ejes cuerpo
316 318 320 322 324 326 328 330 332 334 336-2
0
2
tiempo [s]
q [ra
d/s]
316 318 320 322 324 326 328 330 332 334 336-0.5
0
0.5
tiempo [s]
r [ra
d/s]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 108 -
316 318 320 322 324 326 328 330 332 334 336-505
tiempo [s]
ax [m
/s2 ] Aceleración ejes cuerpo
316 318 320 322 324 326 328 330 332 334 336-202
tiempo [s]
ay [m
/s2 ]
316 318 320 322 324 326 328 330 332 334 336-50
050
tiempo [s]
az [m
/s2 ]
Ensayo de Verificación – Dinámica Lateral-Direccional
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 111137.356537.357
37.3575
tiempo [s]
Latit
ud [º
] Posición
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111-6.13
-6.128-6.126
tiempo [s]
Long
itud
[º]
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111160180200
tiempo [s]
Altu
ra [m
]
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 111105
10
tiempo [s]
Vx
[m/s
]
Velocidad Tierra
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111102030
tiempo [s]
Vy
[m/s
]
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111-505
tiempo [s]
Vz
[m/s
]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 109 -
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111-50
050
tiempo [s]
roll
[º]
Actitud - Euler
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111-50
050
tiempo [s]
pitc
h [º
]
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 11116080
100
tiempo [s]
yaw
[º]
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111-0.4
-0.2
0
tiempo [s]
Ale
rone
s
Señales de control
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111-0.02
0
0.02
tiempo [s]
Ele
vado
res
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111-0.5
0
0.5
tiempo [s]
Tim
ón v
ertic
al
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 11110.25
0.3
0.35
tiempo [s]
Pal
anca
de
gase
s
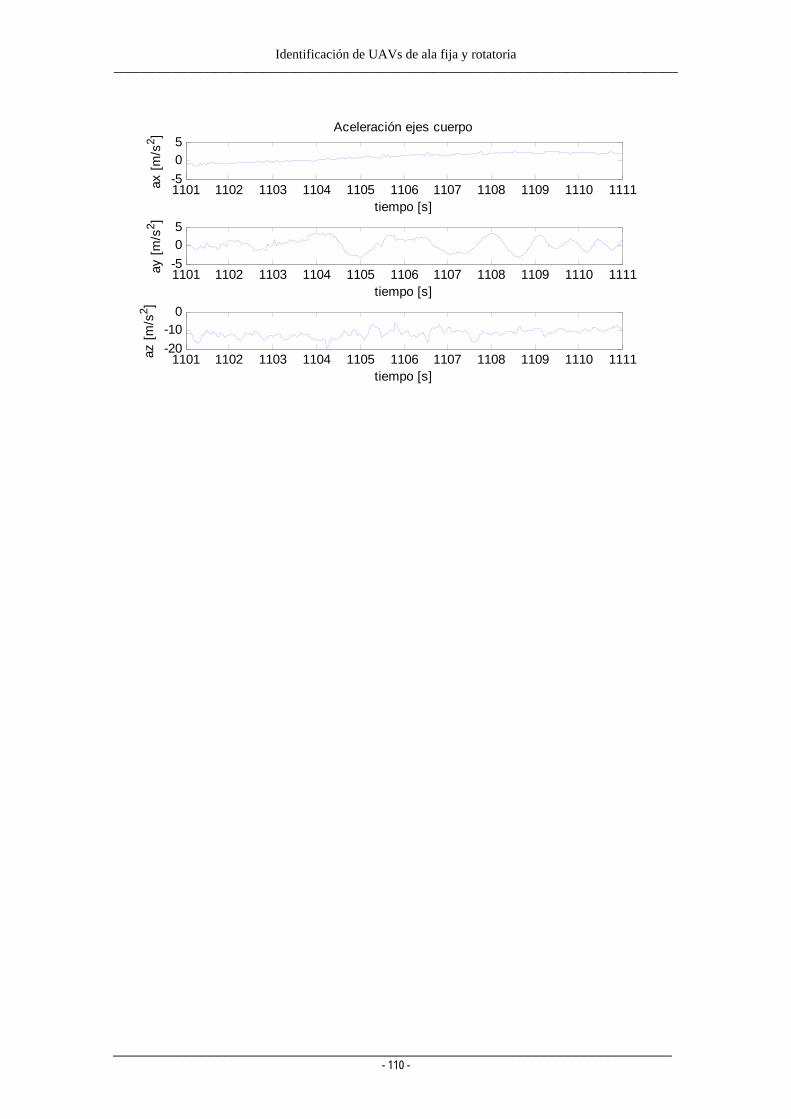
Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 110 -
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111-505
tiempo [s]
ax [m
/s2 ] Aceleración ejes cuerpo
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111-505
tiempo [s]
ay [m
/s2 ]
1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111-20-10
0
tiempo [s]
az [m
/s2 ]

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 111 -
Bibliografía
[1] Mark B. Tischler y Robert K. Remple. “Aircraft and Rotorcraft System Identification: Engineering Methods with Test Examples” AIAA Education Series 2006
[2] Bernard Mettler.“Identification Modeling and Characteristics of Miniature
Rotorcraft” Kluwer Academic Publishers 2003 [3] Daniel Santamaría Rubio. “Proyecto fin de carrera. Modelado y análisis de
las derivadas de estabilidad de un avión de ala fija” Universidad de Sevilla
[4] Luís Sandino. “Proyecto fin de master. Modelado Identificación y Control de
un Helicóptero Autónomo” Universidad de Sevilla
[5] Mark B. Tischler, Bernard Mettler y Takeo Kanade. “System Identification
of Small-Size Unmanned Helicopter Dynamics” American Helicopter Society 55th Forum, Montreal, Quebec, Canada, May 25-27, 1999
[6] Mark B. Tischler. “Frequency-Response Identification of XV-15 Tilt-Rotor
Aircraft Dynamics” NASA Technical Memorandum 89428, May 1987 [7] Mark B. Tischler. “System Identification Methods for Aircraft Flight Control
Development and Validation” NASA Technical Memorandum 110369 [8] Christina M. Ivler y Mark B. Tischler.“System Identification Modeling for
Flight Control Design” The RAeS Rotorcraft Handling-Qualities Conference, University of Liverpool, UK, 4-6 Nov 2008
[9] Michael A. Lawler, Christina M. Ivler y Mark B. Tischler. “System
Identifiacion of the Longitudinal/Heave Dynamics for a Tandem-Rotor Helicopter Including Higher-Order Dyamics” AIAA
[10] Dept. of Defense Interface Standard. “Flying Qualities of Piloted Aircraft”
USAF MIL-STD-1797
[11] Maine,R.E. and Iliff,K.W. “Theory and Practice of Estimating the Accuracy of Dynamics Flight- Determined Coefficients” NASA RP 1077, 1981

Identificación de UAVs de ala fija y rotatoria __________________________________________________________________________________________________________
______________________________________________________________________ - 112 -